Application Type
Patents
Application SubType
National Patent
(10) Registration Number and Date
Status
ACTIVE ( D10)
(180) Expiration Date
(20) Filing Number and Date
TH 2501000012 2025.01.02
(40) Publication Number and Date
TH 2501000012A
A
2025.07.14
(85) National Entry Date
(30) Priority Details
CN
CN2024116005244
2024.11.11
CN2024112637476
2024.09.10
(51) IPC Classes
(71/73) Applicant
(TH) นาย ลู่ หยวนคง : รูม 701, บิลดิ้ง 9, 1399 เอเวอเรสต์ อเวนิว, โตวเหมิน ดิสทริกท์, จูไห่, กวางตง โพรวินซ์ 519000
(72) Inventor
(TH) นาย ลู่ หยวนคง : รูม 701, บิลดิ้ง 9, 1399 เอเวอเรสต์ อเวนิว, โตวเหมิน ดิสทริกท์, จูไห่, กวางตง โพรวินซ์ 519000
(74) Representative
(TH) นาย พัฒน์ เตชะไพฑูรย์ : บริษัท อาดาสตร้า ไอพี (ประเทศไทย) จำกัด เลขที่ 164 ซอยหมู่บ้านปัญญา ตำบลสวนหลวง อำเภอสวนหลวง จังหวัดกรุงเทพมหานคร
(54) Title
(TH)
หุ่นยนต์ทำความสะอาด
(57) Abstract
(TH)
OCR 10KL (21/01/2568)
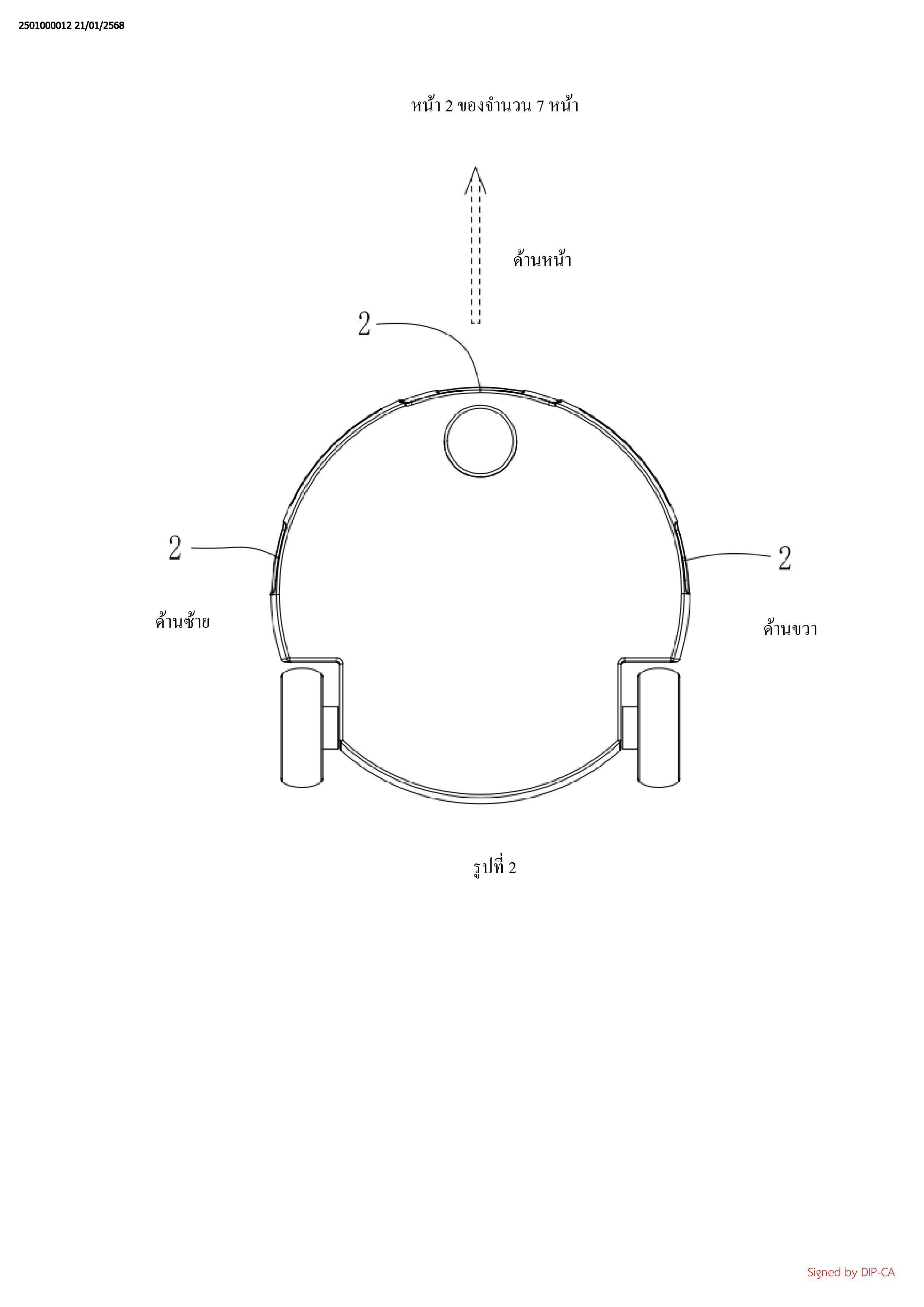
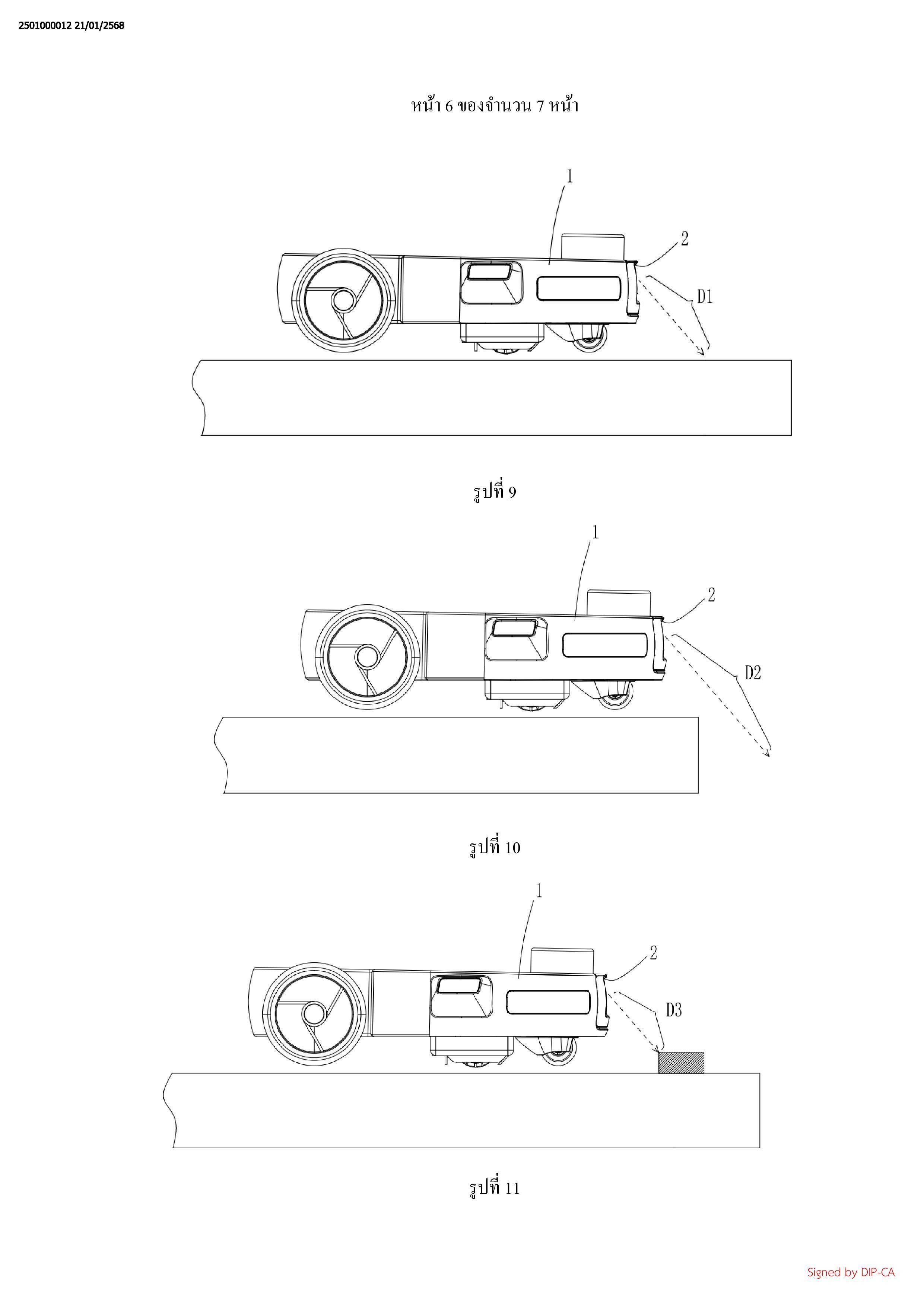
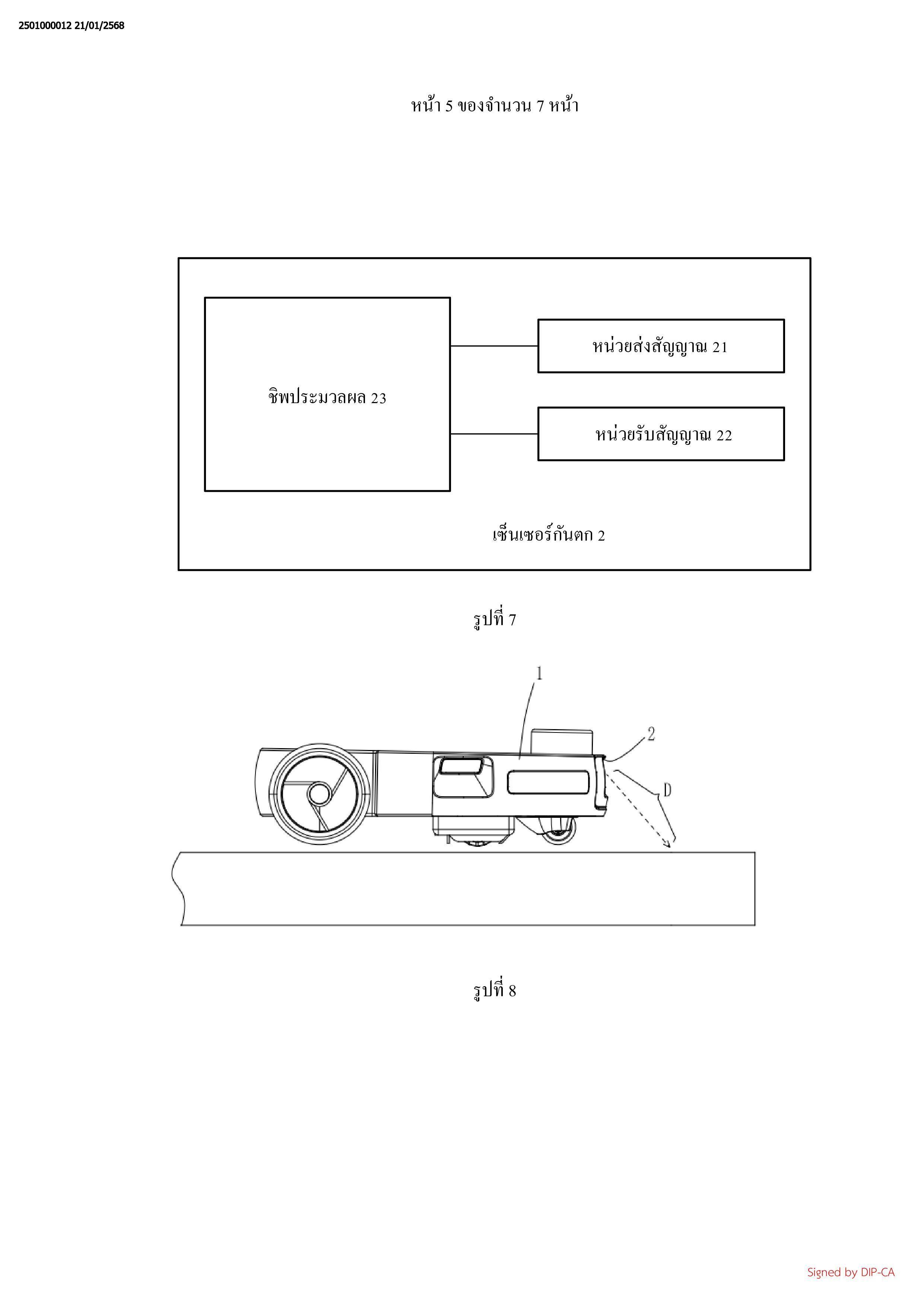
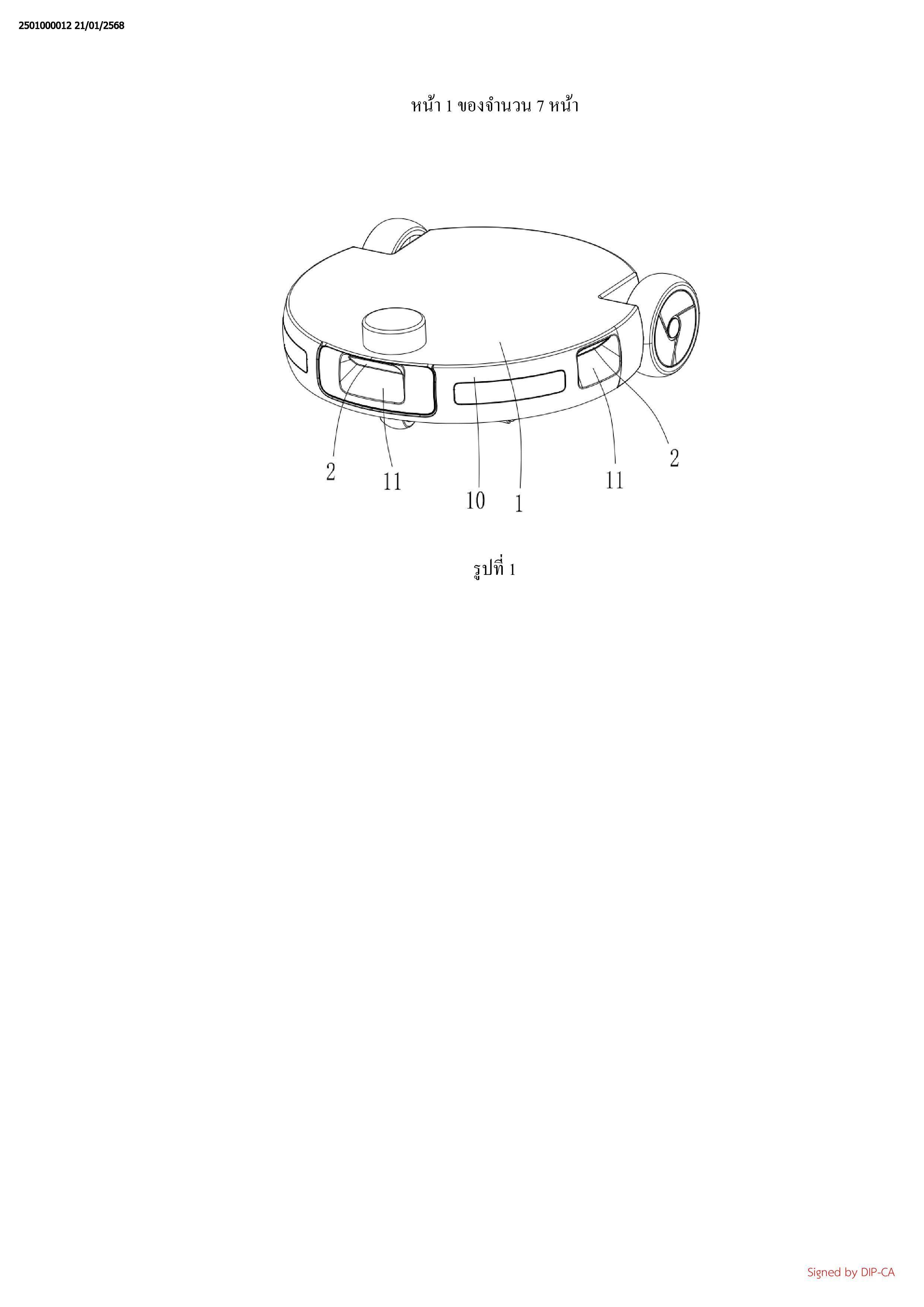
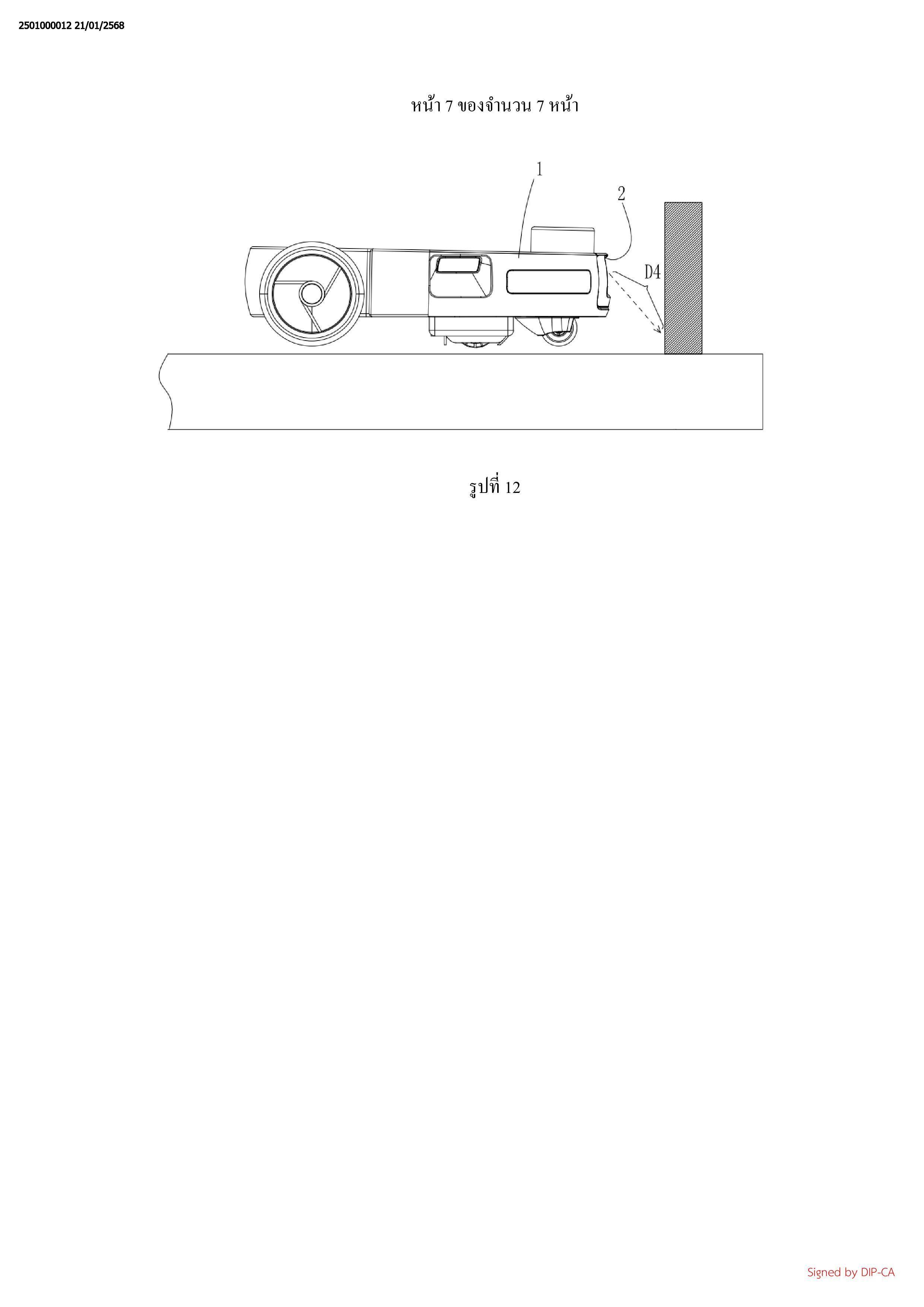
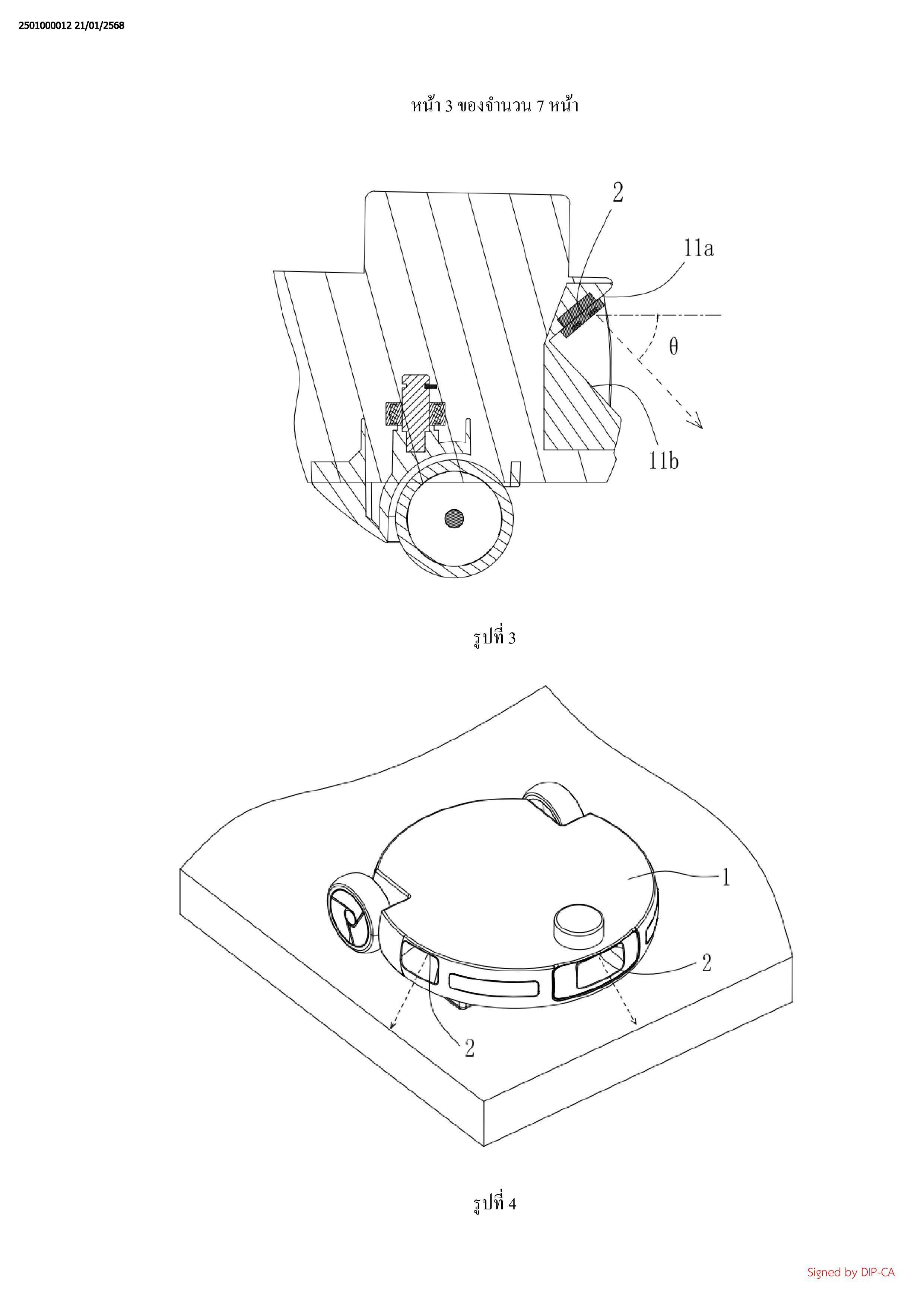
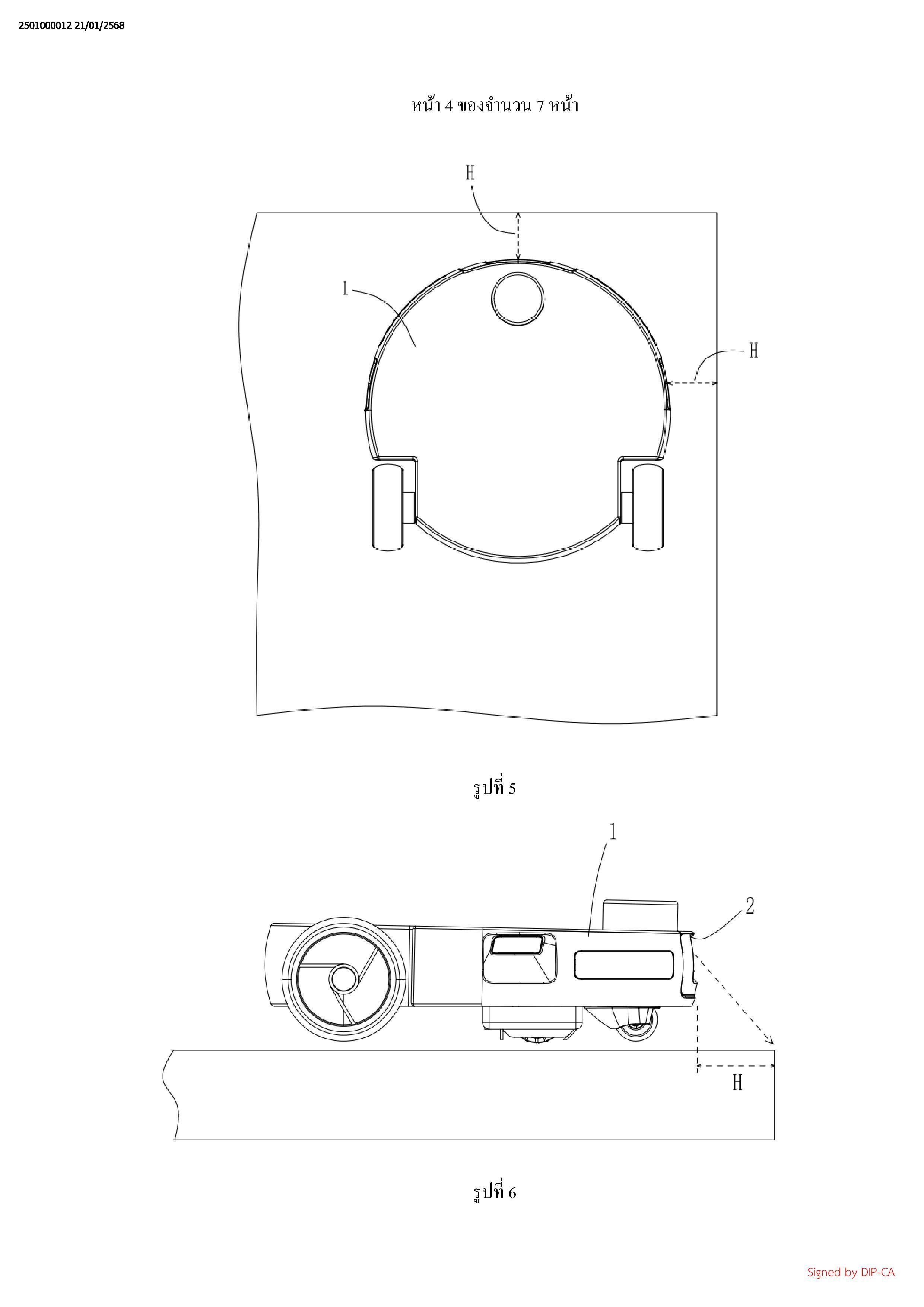
ที่ถูกเปิดเผยคือหุ่นยนต์ทำความสะอาครวมด้วยลำตัวและเซ็นเซอร์กันตก เซ็นเซอร์กันตกถูกจัดเรียง
บนผนังด้านข้างของลำตัวตามเส้นทางเดินด้านหน้า ด้านซ้ายและด้านขวา และเซ็นเซอร์กันตกถูกจัดเรียงให้เอียง
ลงและเอียงออก และสามารถส่งสัญญาณตรวจจับในลักษณะเอียงและพุ่งออก เซ็นเซอร์กันตกถูกจัดเรียงบนผนัง
ด้านข้างของลำตัว จึงพัฒนาระยะการตวจจับ เซ็นเซอร์กันตกตรวจจับตามหลักการทำงานของช่วงเลเซอร์ TOF
ในลักษณะที่แม่นยำและน่าเชื่อมากกว่า และสามารถตรวจจับหน้าผา ขั้น สิ่งกีดขวางและสิ่งที่เหมือนกัน และ
ได้รับฟังก์ชั่นการตรวจจับที่หลากหลาย ดังนั้นชนิด ปริมาณ และต้นทุนของเซ็นเซอร์สามารถถูกลด
(58) Citations
License Details
(98) Annuity Details
| Year | Validity Start | Validity End | Payment |
|---|