OCR 06WT
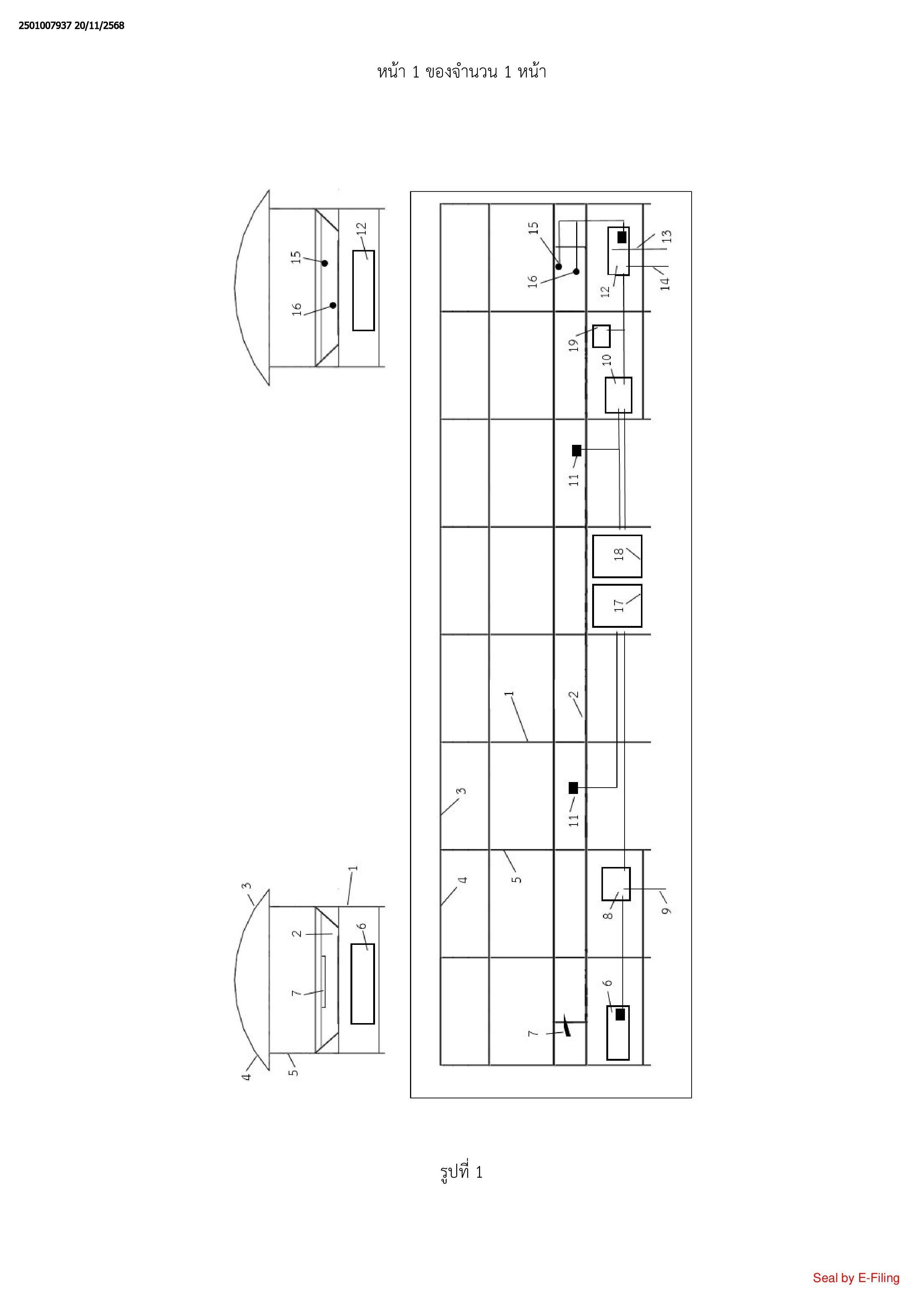
1. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ประกอบด้วย ระบบโครงสร้าง (1) ที่มีบ่อบรรจุน้ำ
(Pond) (2) สำหรับบรรจุน้ำในการเพาะเลี้ยงไข่น้ำอยู่ภายใน ประกอบร่วมกับระบบเก็บเกี่ยวผลผลิตแบบกึ่ง
ต่อเนื่อง (Semi-Harvesting Process) สำหรับเก็บเกี่ยวผลผลิต ระบบหมุนเวียนน้ำเพื่อการบำบัด
(Recirculation and Treatment System) สำหรับบำบัดน้ำในระบบการเพาะเลี้ยง และระบบควบคุม
สารอาหารและสภาพแวดล้อม (Nutrition Controller and Accessories) สำหรับควบคุมปริมาณสารอาหาร
ในบ่อบรรจุน้ำ (2) โดยมีลักษณะเฉพาะคือ
ระบบโครงสร้าง (1) ผลิตจากเหล็กกล่องกัลวาไนซ์ ภายในมีพื้นที่ยกสูงรองรับบ่อบรรจุน้ำ (2) ที่มี
ลักษณะรูปทรงสี่เหลี่ยมคางหมู (Trapezoidal Shaped) ผนังบ่อโดยรอบทำมุมป้านกับพื้นบ่อ ระหว่าง 135-
150 องศา ด้านบนของระบบโครงสร้าง (1) จัดให้มีโครงหลังคาและติดตั้งวัสดุพรางแสง (3) ไว้ด้านในโครง
หลังคา ส่วนด้านนอกของโครงหลังคาติดตั้งวัสดุกันน้ำและแสงยูวี (4) ภายในบ่อบรรจุน้ำ (2) บริเวณด้านหน้า
จัดให้มีรางรับสแตนเลส (7) ที่ภายในประกอบด้วยตะแกรงสแตนเลส ขนาด 100 เมช (Mesh) และมีถุงผ้าไนล่อน
ขนาด 150 เมช กรองซ้อนด้านใน สำหรับเก็บเกี่ยวผลผลิตไข่น้ำ ด้านล่างของบ่อบรรจุน้ำ (2) จัดให้มีถังรับน้ำ
ล้น (6) สำหรับรองรับน้ำล้นขณะเก็บเกี่ยวผลผลิตไข่น้ำ
ระบบเก็บเกี่ยวผลผลิตแบบกึ่งต่อเนื่อง ประกอบด้วย เซนเซอร์รูปภาพ (Image Sensor) ติดตั้งไว้ที่บ่อ
บรรจุน้ำ (2) สำหรับเก็บภาพความหนาแน่นของไข่น้ำอย่างต่อเนื่อง จากนั้นส่งข้อมูลไปยังชุดโปรแกรม
คอมพิวเตอร์ (Wolffia.AI) เพื่อประมวลผลความหนาแน่นต่อพื้นที่ และคำนวณปริมาณผลผลิตต่อรอบ โดยเมื่อ
ความหนาแน่นต่อพื้นที่ของไข่น้ำอยู่ในช่วงที่กำหนดให้เก็บเกี่ยว ระบบจะส่งคำสั่งเป็นสัญญาณไฟฟ้าไปยังปั๊ม
น้ำให้สูบน้ำเข้ามายังบ่อบรรจุน้ำ (2) เพื่อสร้างแรงขับเคลื่อนการหมุนเวียนน้ำ กระทั่งไข่น้ำที่ลอยบนผิวน้ำไหล
ล้นเข้ามาและถูกกักเก็บอยู่ภายในรางรับสแตนเลส (7) ส่วนน้ำที่ล้นจากการเก็บเกี่ยวจะไหลลงสู่ถังรับน้ำล้น
(6) และถูกปั๊มน้ำสูบออกไปยังเครื่องกรองดรัมฟิลเตอร์ (Drum Filter) (8) ขนาดระหว่าง 75-120 ไมครอน
เพื่อแยกตะกอนหยาบ (9) โดยอัตโนมัติและนำไปกำจัดทางชีวภาพ ส่วนน้ำที่ผ่านการกรองจะถูกส่งไปบำบัดยัง
ชุดถังกรองละเอียด (10)
ระบบหมุนเวียนน้ำเพื่อการบำบัด ประกอบด้วย ปั๊มน้ำแบบจุ่มแช่ (11) อย่างน้อยสองตำแหน่ง ติดตั้ง
ภายในบ่อบรรจุน้ำ (2) สำหรับหมุนเวียนน้ำภายในบ่อบรรจุน้ำ (2) ด้วยการสูบน้ำภายในบ่อมาทำการบำบัดที่
ชุดถังกรองละเอียด (10) และน้ำที่ผ่านการบำบัดจากชุดถังกรองละเอียด (10) จะถูกสุ่มตัวอย่างเพื่อตรวจวัด
ค่าการปนเปื้อน ด้วยระบบตรวจวัดค่าการปนเปื้อน ซึ่งประกอบกันเป็นชุดอยู่ในชุดถังกรองละเอียด (10) โดย
วัดค่าการดูดกลืนรังสียูวีขนาด 5 วัตต์ ที่ความยาวคลื่น 200-290 นาโนเมตร แล้วเทียบค่ากับสมการของ
สารละลายมาตรฐาน ก่อนส่งต่อไปยังถังพัก (12)
ชุดถังกรองละเอียด (10) ประกอบด้วย ชุดถังกรองละเอียดขนาด 5-10 ไมครอน ประกอบร่วมกับ
ระบบฆ่าเชื้อโรคด้วยหลอดยูวี (UV) ขนาด 18 วัตต์ หรือไม่ต่ำกว่า 1.5-2.0 วัตต์ต่อตารางเซนติเมตร (Ws/cm )
และระบบลดค่าอินทรีย์สารละลายในน้ำด้วยก๊าซโอโซน (Ozone) ขนาด 2,000 มิลลิกรัมต่อชั่วโมง หรือความ
เข้มข้น (Dosage) ไม่ต่ำกว่า 0.5-1.5 มิลลิกรัม/มิลลิกรัมปริมาณคาร์บอนอินทรีย์ทั้งหมด (mg/mg TOC)
ถังพัก (12) ติดตั้งวาล์วลูกลอยขนาด 6 หุน หรือ 3/4 นิ้ว ไว้ภายใน เพื่อควบคุมระดับน้ำ และเชื่อมต่อ
กับระบบการจ่ายน้ำดิบ (13) สำหรับจ่ายน้ำที่มีความสะอาดเข้าสู่ระบบ และมีระบบการระบายน้ำทิ้ง (Drain)
(14) สำหรับนำน้ำออกจากระบบ หรือเพื่อล้างบ่อสำหรับเริ่มการเพาะเลี้ยง และรองรับการผสมสารละลาย
สารอาหารไฮโดรโพนิกส์สำหรับจ่ายเข้าไปยังบ่อบรรจุน้ำ (2)
ระบบควบคุมสารอาหารและสภาพแวดล้อม ประกอบด้วย เซนเซอร์ตรวจวัดค่าการนำไฟฟ้า สำหรับ
เทียบค่าการนำไฟฟ้าของสารละลายสารอาหารที่อยู่ในน้ำ เซนเซอร์วัดค่าความเป็นกรด-ด่าง (pH) สำหรับ
ตรวจสอบค่าความเป็นกรด-ด่างของน้ำ และเซนเซอร์วัดค่าอุณหภูมิน้ำ (T ) สำหรับตรวจวัดค่าอุณหภูมิของน้ำ
w ติดตั้งไว้ที่บ่อบรรจุน้ำ (2) โดยค่าที่วัดได้จากเซนเซอร์แต่ละชนิดจะถูกส่งไปยังชุดตู้ควบคุมรอง (18) ซึ่งบรรจุ
อุปกรณ์อิเล็กทรอนิกส์เพื่อแสดงข้อมูลที่ตรวจวัดได้ และควบคุมระบบควบคุมสารอาหารและสภาพแวดล้อมใน
การปรับค่าการนำไฟฟ้า ค่าความเป็นกรด-ด่าง และค่าอุณหภูมิน้ำ ให้อยู่ในช่วงที่กำหนด
ที่ซึ่ง ค่าการนำไฟฟ้าของสารละลายสารอาหาร กำหนดให้มีค่าอยู่ในช่วง 0.5-0.7 มิลลิซีเมนส์ต่อ
เซนติเมตร (mS/cm) ค่าความเป็นกรด-ด่าง กำหนดให้มีค่าอยู่ในช่วง 5.5-6.5 และค่าอุณหภูมิ กำหนดให้มีค่า
อยู่ในช่วง 20-35 องศาเซลเซียส
ชุดตู้ควบคุมหลัก (17) ประกอบด้วย ระบบไฟฟ้าสำหรับควบคุมระบบเก็บเกี่ยวผลผลิตแบบกึ่งต่อเนื่อง
ระบบหมุนเวียนน้ำเพื่อการบำบัด ระบบการระบายน้ำทิ้ง (14) และระบบควบคุมสารอาหารและสภาพแวดล้อม
โปรแกรมคอมพิวเตอร์ (Wolffia.AI) กำหนดให้ควบคุมการทำงานของระบบด้วยการรับข้อมูลจาก
เซนเซอร์รูปภาพ และนำมาประมวลผลด้วยชุดเก็บข้อมูลหลัก (Main Correction System, MCS) เพื่อวัดค่า
ความหนาแน่นผลผลิตไข่น้ำต่อพื้นที่ สร้างแบบจำลอง และทำนายข้อมูลการเจริญเติบโตของไข่น้ำ (Growth
rate) ด้วยระบบอัจฉริยะบนฐานข้อมูลของเส้นโค้งมาตรฐานจากฐานข้อมูลงานวิจัยที่กำหนดไว้ล่วงหน้า (Big
data) จากนั้นจึงสั่งการและควบคุมการเพาะเลี้ยงผ่านระบบรอง (Sub Correction System, SCS) ซึ่งมีการ
เชื่อมโยงเข้ากับระบบควบคุมสารอาหารและสภาพแวดล้อม
2. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง บ่อบรรจุน้ำ (2) กำหนดให้
ด้านหลังของบ่อมีระดับพื้นผิวสูงกว่าด้านหน้าบ่อ เพื่อให้น้ำภายในเกิดการหมุนเวียนตามธรรมชาติ
3. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง บ่อบรรจุน้ำ (2) ที่เหมาะสม
กำหนดให้โครงรอบรับ คือ แผ่นวีวาบอร์ด หนา 12-16 มิลลิเมตร และผิวบ่อด้านใน คือ แผ่นพลาสติกความ
หนาแน่นสูง (HDPE) หนา 0.5 มิลลิเมตร
4. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง วัสดุพรางแสง (3) จัดให้เป็นวัสดุ
ที่พรางแสงได้ระหว่าง 50-80% ที่เหมาะสม คือ ตาข่ายกรองแสง (Shading Net) สีดำ หรือสีเขียว อย่างใด
อย่างหนึ่งหรือทั้งสองอย่างประกอบรวมกัน โดยติดตั้งอย่างน้อย 2 ชั้น
5. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง วัสดุกันน้ำและแสงยูวี (4) จัดให้
เป็น แผ่นพลาสติกใสหนา 0.20-0.25 มิลลิเมตร
6. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง บ่อบรรจุน้ำ (2) โดยรอบ ติดตั้ง
มุ้งตาข่ายกันแมลง (5) แบบไนล่อนสีขาว ขนาด 16 ตา สำหรับป้องกันแมลงเข้ามาภายใน
7. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ถังรับน้ำล้น (6) จัดให้ติดตั้ง
เซนเซอร์ค่าระดับน้ำ (Level Controller) ที่ตำแหน่งบนและล่างของถังรับน้ำล้น (6) สำหรับควบคุมระดับ
ภายในถังรับน้ำล้น (6) ไม่ให้ล้น โดยหากระดับน้ำถึงปริมาณที่กำหนดเซนเซอร์จะส่งสัญญาณไปยังชุดโปรแกรม
คอมพิวเตอร์เพื่อส่งคำสั่งให้ปั๊มน้ำสูบน้ำไปยังเครื่องกรองดรัมฟิลเตอร์ (8)
8. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ระบบเก็บเกี่ยวผลผลิตแบบกึ่ง
ต่อเนื่อง จัดให้มีการเก็บเกี่ยวเมื่อความหนาแน่นของผลผลิตไข่น้ำต่อพื้นที่เพิ่มขึ้นอย่างน้อย 10 เท่า
9. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง แรงขับเคลื่อนการหมุนเวียนน้ำ ที่
เหมาะสมในการในการเก็บเกี่ยวผลผลิตแบบกึ่งต่อเนื่อง คือ ค่าอัตราการไหลน้ำประมาณ 50-100 ลิตรต่อนาที
(LPM) หรือค่าเรย์โนลด์นัมเบอร์ (Reynold number) อยู่ในช่วง 200,000-220,000
10. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ปั๊มน้ำแบบจุ่มแช่ (11) จัดให้
ทำงานเพื่อหมุนเวียนน้ำภายในบ่อบรรจุน้ำ (2) ให้มีอัตราหมุนเวียนน้ำต่อชั่วโมง (Water Change per Hour,
WCH) ประมาณ 6 ลูกบาศก์เมตรต่อชั่วโมง (m /h)
11. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ระบบการจ่ายน้ำดิบ (13) จัดให้
มีปั๊มน้ำแบบจุ่มแช่อย่างน้อยสองตำแหน่ง สำหรับสูบน้ำจากถังพัก (12) กลับขึ้นไปยังบ่อบรรจุน้ำ (2) โดยมีการ
ทำงานที่ประกอบด้วย ปั๊มน้ำตำแหน่งหนึ่ง สูบน้ำเข้าไปยังบ่อบรรจุน้ำ (2) ช่วงบนผิวน้ำ (15) ซึ่งมีหัวฉีดน้ำ
แบบปากเป็ด (Plastic Outflow Fitting Duckbill) ขนาด 4 หุน หรือ 1/2 นิ้ว ที่ปรับมุมเอียงได้ จำนวน 5 ตัว
วางเรียงต่อกันอยู่ใต้ระดับผิวน้ำ เพื่อผลักดันไข่น้ำที่ลอยอยู่บนผิวน้ำให้เคลื่อนที่ไปข้างหน้า และปั๊มน้ำอีก
ตำแหน่งหนึ่ง สูบน้ำเข้าไปยังบ่อบรรจุน้ำ (2) ช่วงใต้ก้นบ่อ (16) ซึ่งมีหัวฉีดน้ำแบบปากเป็ด ขนาด 4 หุน หรือ
1/2 นิ้ว ที่ปรับมุมเอียงได้ จำนวน 5 ตัว วางเรียงต่อกันอยู่เหนือระดับพื้นก้นบ่อเพื่อผลักดันตะกอนที่ก้นบ่อน้ำ
ให้ไปถึงปั๊มน้ำแบบจุ่มแช่ (11)
12. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 8 ที่ซึ่ง หัวฉีดน้ำแบบปากเป็ด จัดให้มี
การติดตั้งในลักษณะวางสลับเยื้องกันในตำแหน่งใต้ระดับผิวน้ำ และตำแหน่งเหนือระดับพื้นก้นบ่อ
13. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ชุดตู้ควบคุมรอง (18) กำหนดให้
สั่งการเพื่อควบคุมการจ่ายสารละลายสารอาหารจากถังพัก (12) เข้าสู่บ่อบรรจุน้ำ (2) เมื่อค่าการนำไฟฟ้าของ
สารละลายสารอาหารไม่อยู่ในช่วงที่กำหนด และเมื่อเซนเซอร์ตรวจวัดค่าการนำไฟฟ้าตรวจวัดพบว่าค่าการนำ
ไฟฟ้าของสารละลายสารอาหารในบ่อบรรจุน้ำ (2) อยู่ในช่วงที่กำหนด ชุดตู้ควบคุมรอง (18) จะสั่งการให้หยุด
การจ่ายสารละลายสารอาหารจากถังพัก (12)
14. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง สารละลายสารอาหารไฮโดรโพนิกส์
ประกอบด้วย สารอาหารไฮโดรโพนิกส์แบบ A ประกอบด้วย แคลเซียมไนเตรต (CaNO ) สารประกอบเชิงซ้อน
ของเหล็กที่ทนต่อสภาวะกรดอ่อน (Fe-EDTA) สารประกอบเชิงซ้อนของเหล็กที่ทนต่อสภาวะด่างสูง (Fe-
EDDHA) แคลเซียมไดโซเดียมอีดีทีเอ (Ca-EDTA) และกรดบอริก (H BO ) และสารอาหารไฮโดรโพนิกส์แบบ
แบบ B ประกอบด้วยโพแทสเซียมไนเตรต (KNO ) ไดโพแทสเซียมฟอสเฟต (K HPO ) แอมโมเนียมซัลเฟต
((NH ) SO ) แมกนีเซียมซัลเฟต (MgSO ) กรดจัสโมนิก (Jasmonic acid: JA) แมงกานีสซัลเฟต (MnSO )
คอปเปอร์ซัลเฟต (CuSO ) และซิงค์ซัลเฟต (ZnSO ) โดยทำการผสมสารอาหารไฮโดรโพนิกส์แบบ A และ
สารอาหารไฮโดรโพนิกส์แบบ B แยกส่วนกัน จากนั้นผสมสารอาหารไฮโดรโพนิกส์แบบ A ต่อ สารอาหารไฮโดร
โพนิกส์แบบ B เข้าด้วยกัน ในสัดส่วน 1 ต่อ 1
15. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ประกอบเพิ่มเติมด้วย ถังผสม
สารละลายสารอาหารไฮโดรโพนิกส์ (19) สำหรับผสมสารละลายสารอาหารไฮโดรโพนิกส์ และนำส่งไปยังถังพัก
(12) โดยอัตราส่วนสารอาหารไฮโดรโพนิกส์ ต่อ น้ำที่ทำการเพาะเลี้ยง อยู่ที่ 1 ต่อ 500
16. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ชุดตู้ควบคุมรอง (18) กำหนดให้
สั่งการเพื่อควบคุมการจ่ายสารเพิ่มความเป็นกรด (pH Down) เมื่อค่าความเป็นกรด-ด่างน้ำในบ่อบรรจุน้ำ (2)
หน้า ไม่อยู่ในช่วงที่กำหนด และเมื่อเซนเซอร์วัดค่าความเป็นกรด-ด่างตรวจวัดพบว่าค่าความเป็นกรด-ด่างของน้ำใน
บ่อบรรจุน้ำ (2) อยู่ในช่วงที่กำหนด ชุดตู้ควบคุมรอง (18) จะสั่งการให้หยุดการจ่ายสารเพิ่มความเป็นกรด ที่ซึ่ง
การจ่ายสารเพิ่มความเป็นกรด เลือกได้จาก การเติมด้วยผู้ดูแลระบบ หรือควบคุมการจ่ายแบบ
อัตโนมัติจากถังบรรจุสารเพิ่มความเป็นกรด อย่างใดอย่างหนึ่งหรือทั้งสองอย่างประกอบรวมกัน
ที่ซึ่ง สารเพิ่มความเป็นกรด เลือกได้จาก กรดไนตริก (Nitric Acid) 6.8% หรือกรดฟอสฟอริค (Phosphoric Acid)
อย่างใดอย่างหนึ่งหรือทั้งสองอย่างประกอบรวมกัน
17. ระบบการเพาะเลี้ยงไข่น้ำด้วยระบบฟาร์มอัจฉริยะ ตามข้อถือสิทธิ 1 ที่ซึ่ง ชุดตู้ควบคุมรอง (18) กำหนดให้
สั่งการเพื่อเปิดการทำงานของฮีตเตอร์ เมื่อค่าอุณหภูมิของน้ำในบ่อบรรจุน้ำ (2) มีค่าต่ำกว่าที่กำหนด และเมื่อ
เซนเซอร์วัดค่าอุณหภูมิน้ำตรวจวัดพบว่าค่าอุณหภูมิของน้ำในบ่อบรรจุน้ำ (2) อยู่ในช่วงที่กำหนด ชุดตู้ควบคุม
รอง (18) จะสั่งการให้ฮีตเตอร์หยุดการทำงาน