Application Type
Patents
Application SubType
National Patent
(10) Registration Number and Date
Status
ACTIVE ( Q10)
(180) Expiration Date
(20) Filing Number and Date
TH 2501000277 2025.01.15
(40) Publication Number and Date
TH 2501000277A
A
2025.05.19
(85) National Entry Date
(30) Priority Details
(51) IPC Classes
(71/73) Applicant
(72) Inventor
นาย มานัส แดงชาติ : 160/34 ตำบลบางสีทอง อำเภอบางกรวย จังหวัดนนทบุรี
นาย สิทธิโชค สิทธิราชา : 215/83 ตำบลจรเข้บัว อำเภอลาดพร้าว จังหวัดกรุงเทพมหานคร
ว่าที่เรือตรี ทรงวุฒิ มงคลเลิศมณี : 25/376 ตำบลบางไผ่ อำเภอเมืองนนทบุรี จังหวัดนนทบุรี
(74) Representative
(TH) นางสาว วัชราภรณ์ ชัยวรรณ : สถาบันวิจัยและพัฒนา มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร 399 สามเสน ตำบลวชิรพยาบาล อำเภอดุสิต จังหวัดกรุงเทพมหานคร
(54) Title
(TH)
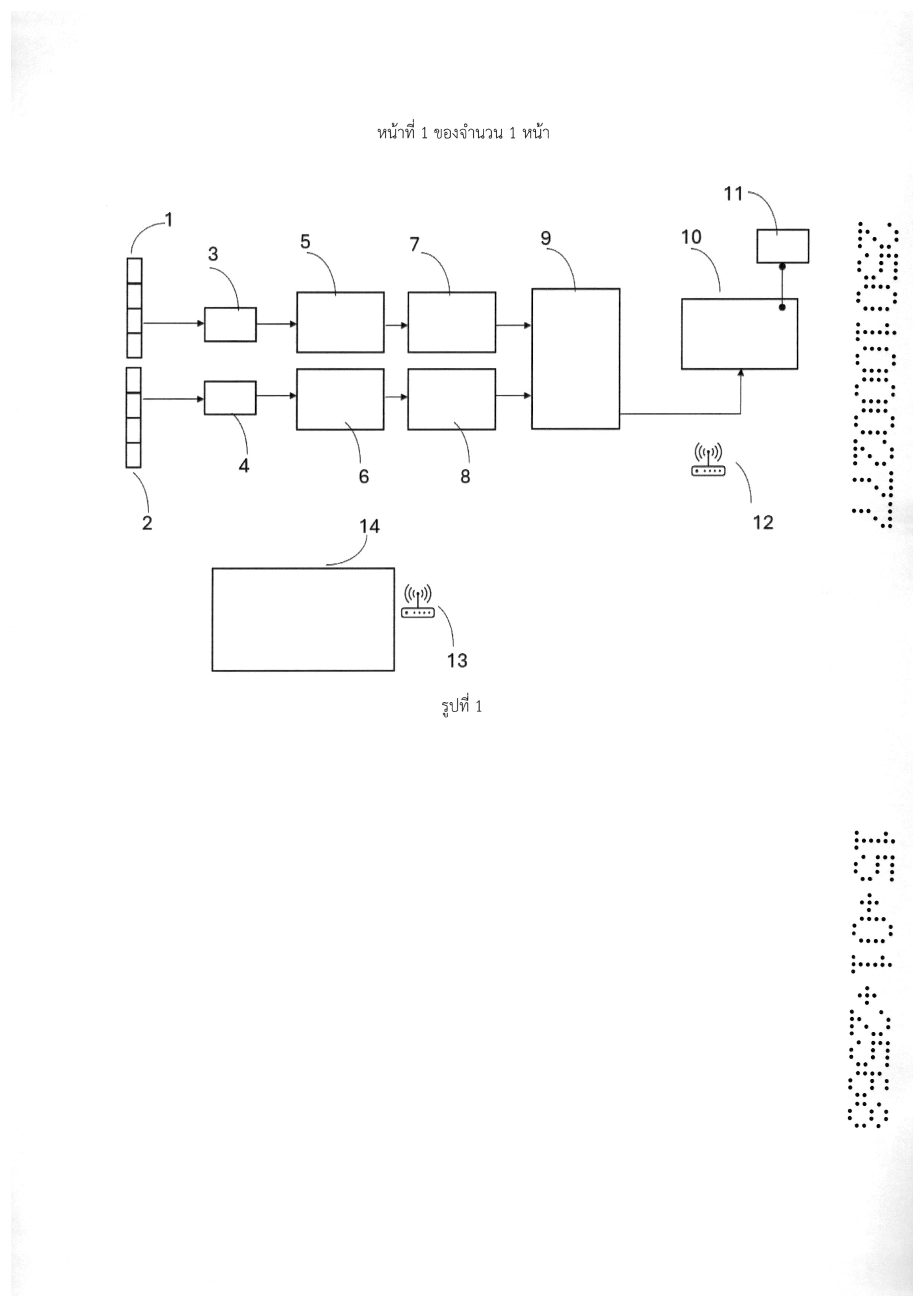
ระบบประเมินผลการลื่นไถลของล้อรถจักรยานยนต์ผ่านการควบคุมระยะไกล
(57) Abstract
(TH) OCR 06WT การประดิษฐ์นี้เป็น ระบบประเมินผลการลื่นไถลของล้อรถจักรยานยนต์ผ่านการควบคุมระยะไกล ที่ประกอบด้วย อุปกรณ์รับส่งแสงล้อหน้าและหลัง ตรวจวัดความถี่จากการหมุนของล้อ และเปลี่ยนเป็นสัญญาณ ความถี่พัลส์ (pulse) ไปสู่อุปกรณ์อ่านสัญญาณความถี่พัลส์ จากนั้นสัญญาณความถี่ถูกส่งเข้าสู่อุปกรณ์แปลงค่า ความเร็วเซิงเส้นล้อหน้าและล้อหลัง เพื่อแปลงผลให้อยู่ในหน่วย (กิโลเมตรต่อชั่วโมง) และส่งผลของความเร็วเชิง เส้นของล้อหน้าและล้อหลังในรูปแบบสัญญาณอนาล็อกเข้าสู่อุปกรณ์แปลงสัญญาณอนาล็อกเป็นสัญญาณดิจิตอล จากนั้นอุปกรณ์ดังกล่าวประมวลผลข้อมูลความเร็วเชิงเส้นและสร้างเป็นรูปกราฟพฤติกรรมความเร็วเชิงเส้นของล้อ หน้าและล้อหลังไปแสดงบนหน้าจอแสดงผลตัวที่หนึ่ง โดยที่การควบคุมและการสั่งการทำงานจากระยะไกล ทำได้ โดยไข้โปรแกรมเข้าถึงการควบคุมระยะไกล ที่เชื่อมต่อสัญญาณจากอุปกรณ์กระจายสัญญาณอินเทอร์เน็ตตัวที่หนึ่ง และ อุปกรณ์กระจายสัญญาณอินเทอร์เน็ตตัวที่สอง ไปยังบนหน้าจอแสดงผลตัวที่สอง ทำให้สามารถเข้าถึงการ ประเมินผลการลื่นไถลของล้อรถจักรยานยนต์ผ่านการควบคุมระยะไกลได้ และการประเมินผลการลื่นไถลของล้อ รถจักรยานยนต์ทั้งล้อหน้าและล้อหลัง พิจารณาจากพฤติกรรมความเร็วเชิงเส้นของล้อหน้าและล้อหลัง เมื่อมีการ ลื่นไถลของล้อใดล้อหนึ่งหรือทั้งสองล้อ พฤติกรรมของความเร็วเชิงเส้นของล้อจะมีค่าเป็นศูนย์ (ล้อไม่หมุนกลิ้ง) ในขณะที่ความเร็วของรถจักรยานยนต์ยังคงมีอยู่
(58) Citations
License Details
(98) Annuity Details
| Year | Validity Start | Validity End | Payment |
|---|