Application Type
National
Application SubType
(10) Registration Number and Date
10202400858U
Status
ACTIVE ( Other event occurred)
(180) Expiration Date
(20) Filing Number and Date
SG 10202400858U 2023.12.31
(40) Publication Number and Date
${pbin}
(85) National Entry Date
(30) Priority Details
CN
CN2023103126551
2023.01.01
(51) IPC Classes
(72) Inventor
(EN) Jiannan CAI : 1st Floor B, Building 4, Hengchangrong High-tech Industrial Park, Dezheng Road,
Jiuhua LI
Shaojie HU
Weidong ZHU
(74) Representative
(54) Title
(57) Abstract
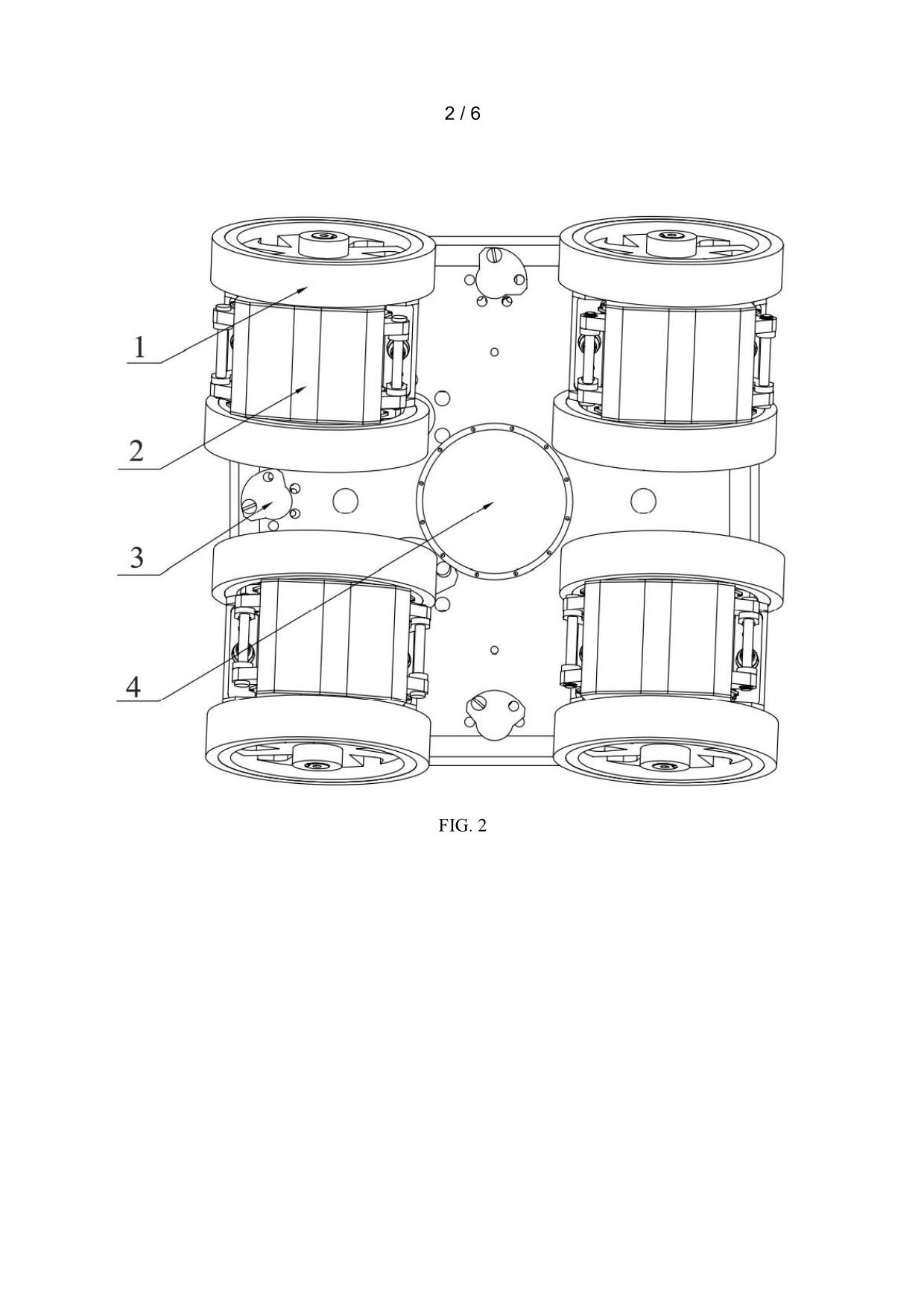
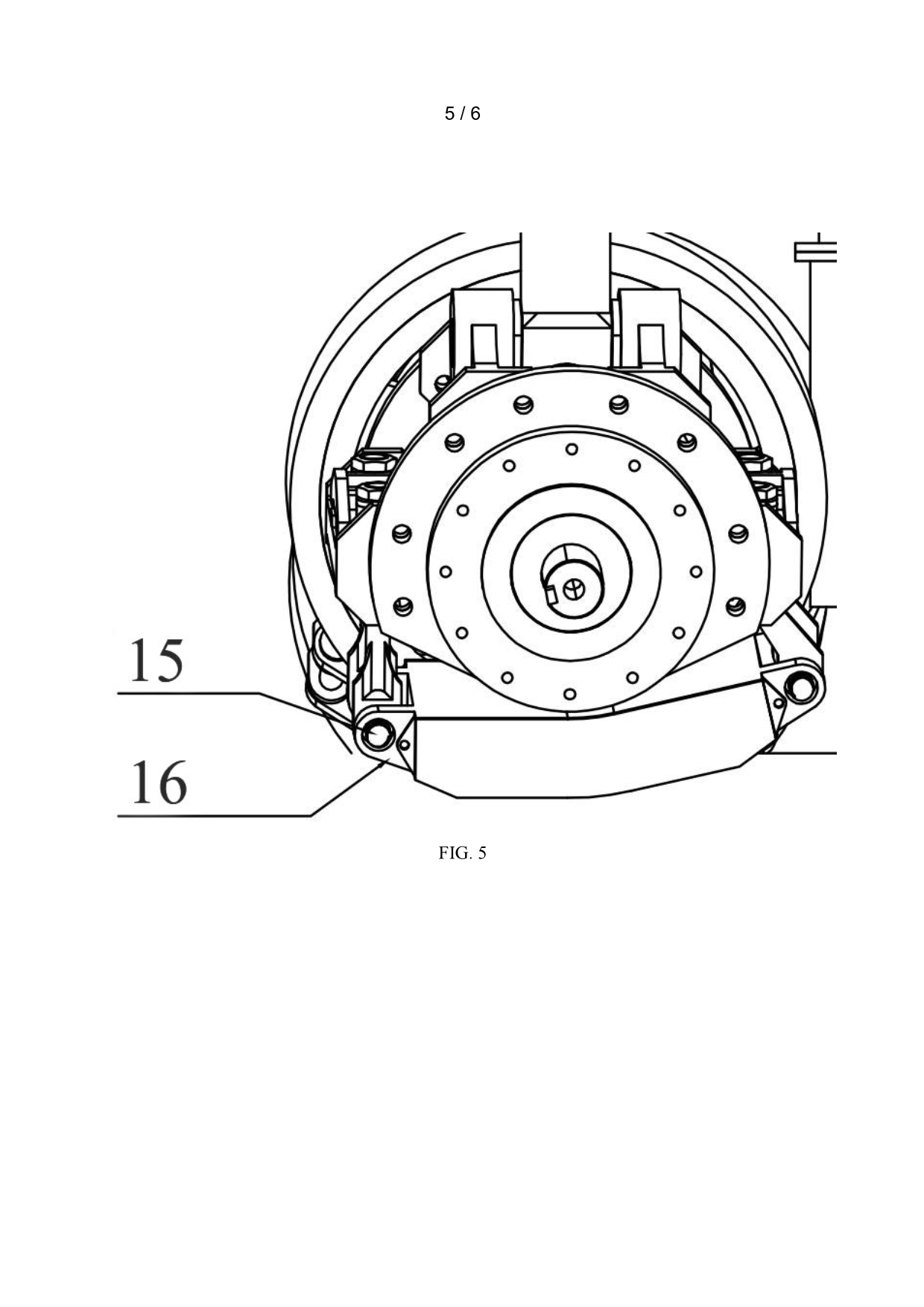
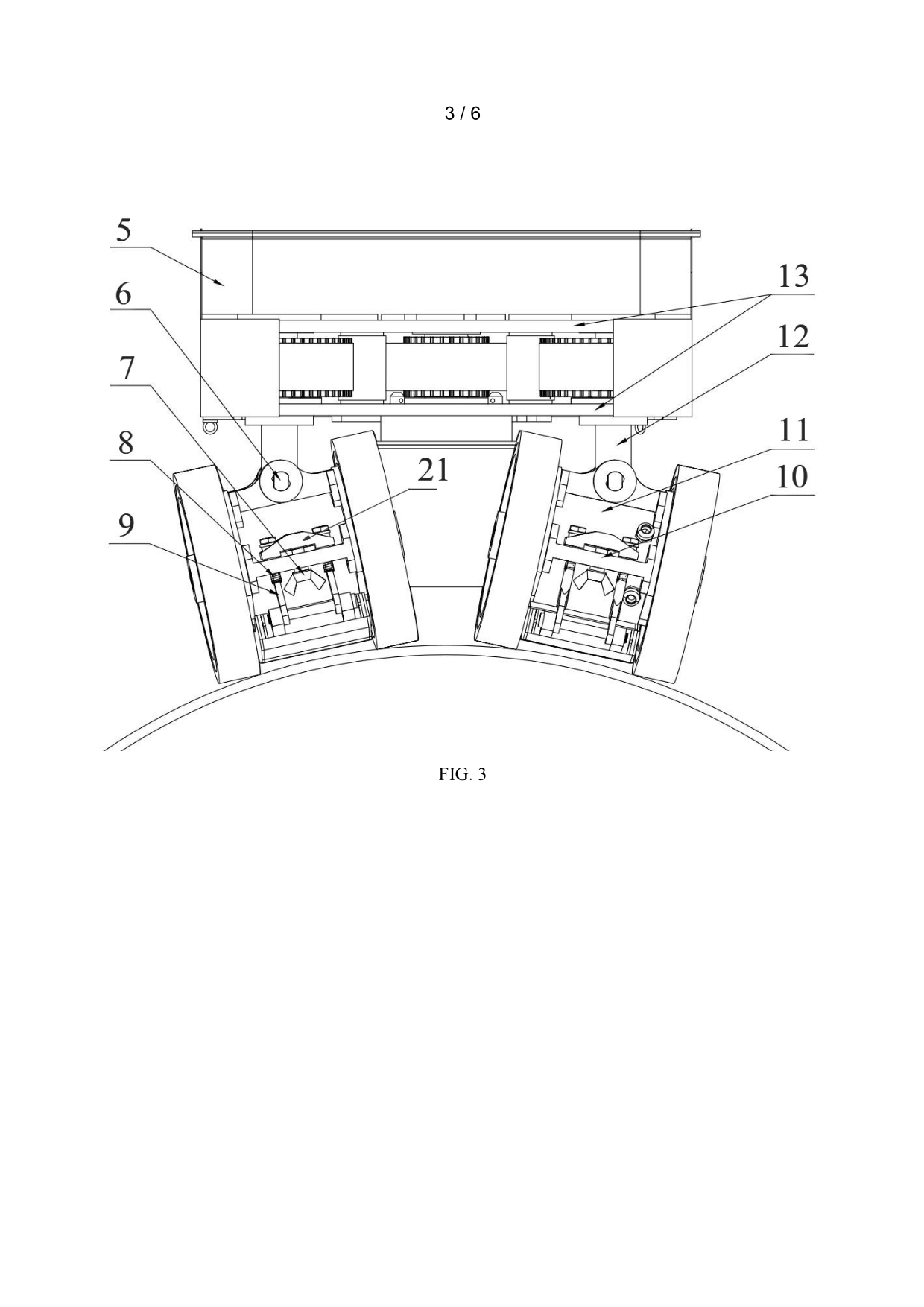
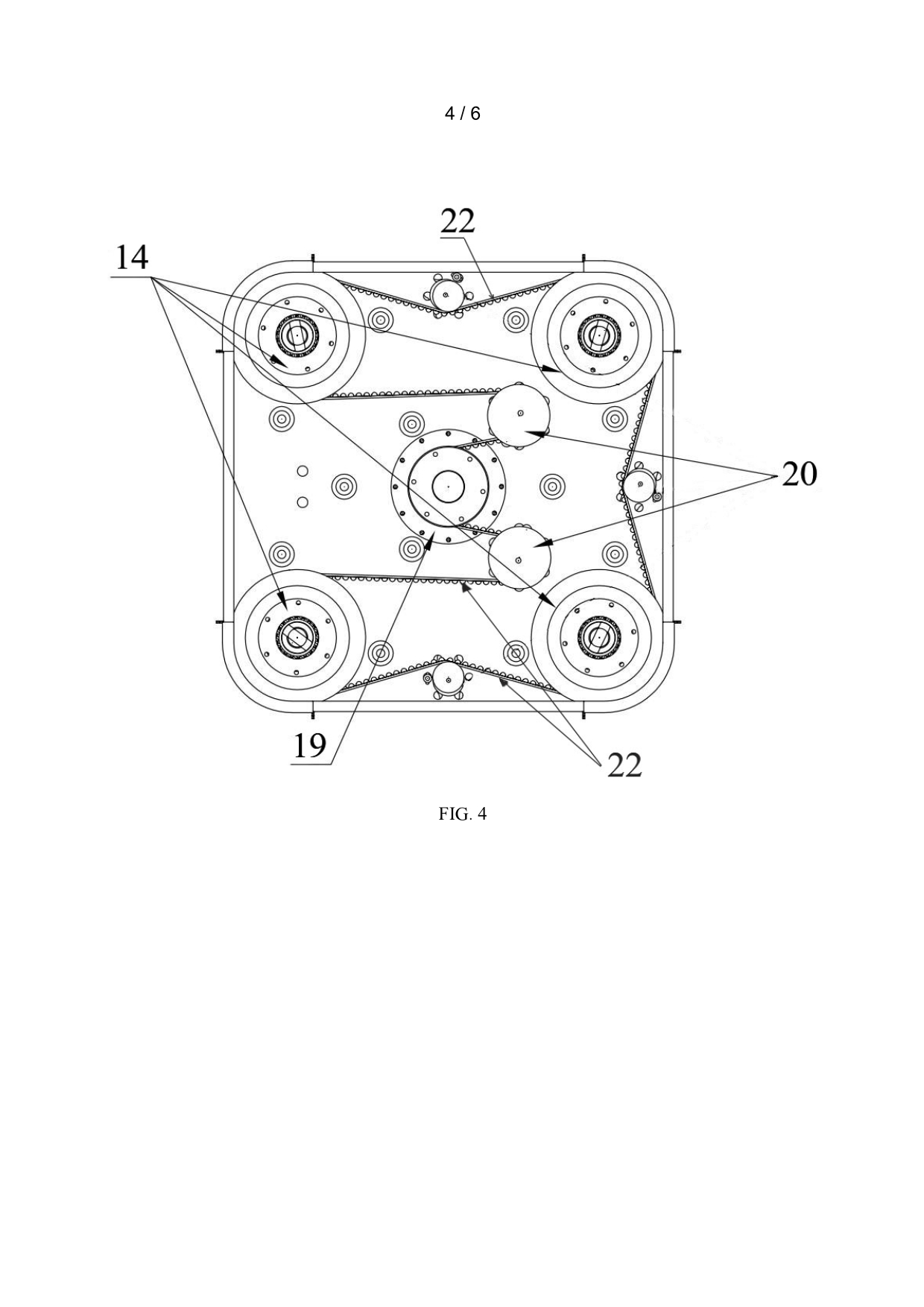
(EN) -10- PIPE CLIMBING ROBOT ABSTRACT 5 A pipe climbing robot including a veering mechanism is disclosed. A control box (5) is arranged at a top of the veering mechanism. The veering mechanism is powered by a single motor. Each of a plurality of driving units is connected with the veering mechanism at each of four corners of a bottom of the veering mechanism. Each of the plurality of driving units includes two driving wheels (1). A lower part of each of the plurality of driving units is connected with an adsorption apparatus (2) 10 through an adjusting mechanism. The adsorption apparatus (2) has an adjustable adsorption force. Each of the plurality of driving units is connected with the veering mechanism through a curvature self-adaptive mechanism (6). (To be published with Fig. 1) 15
(58) Citations
License Details
(98) Annuity Details
| Year | Validity Start | Validity End | Payment |
|---|