OCR 06WT
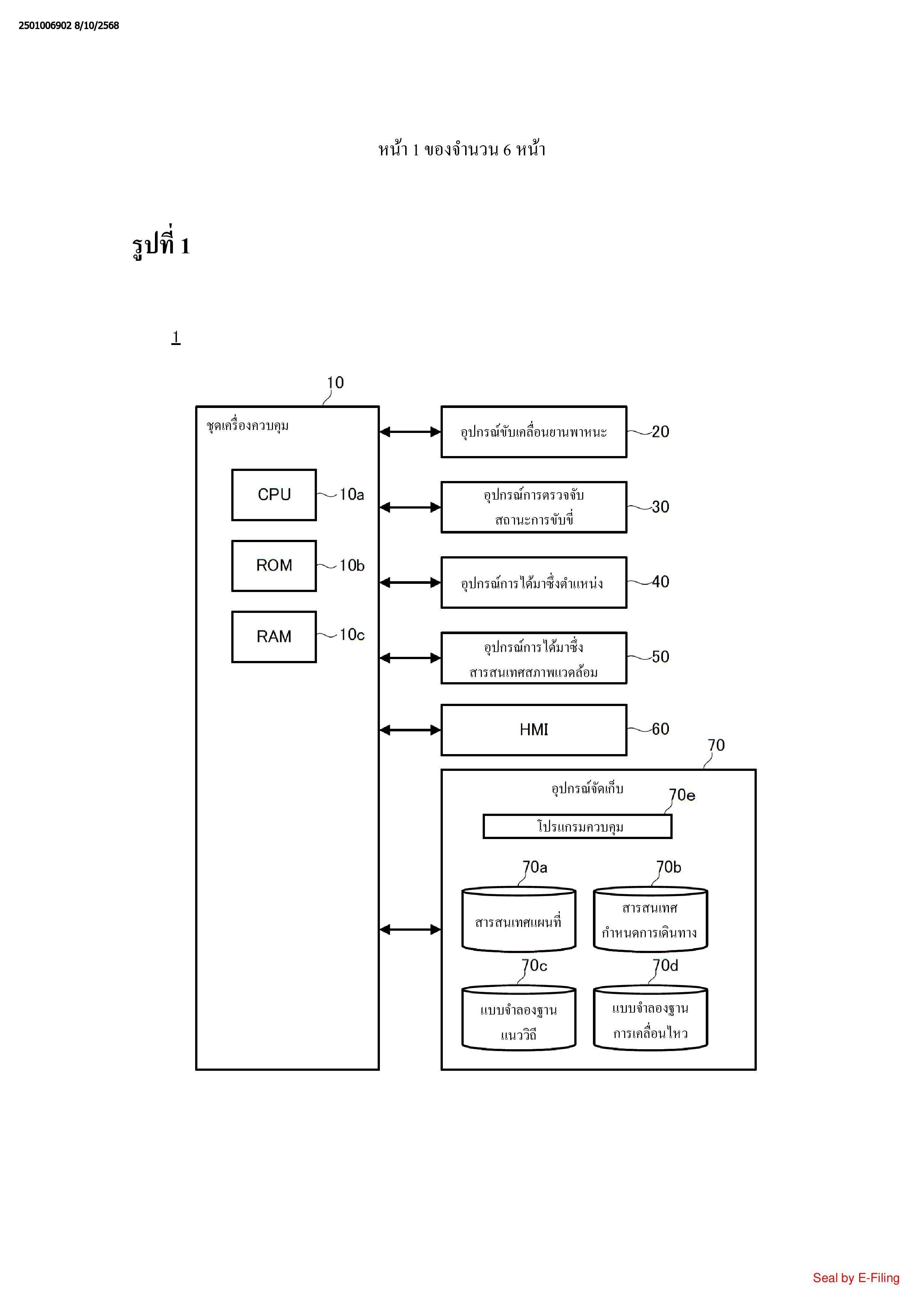
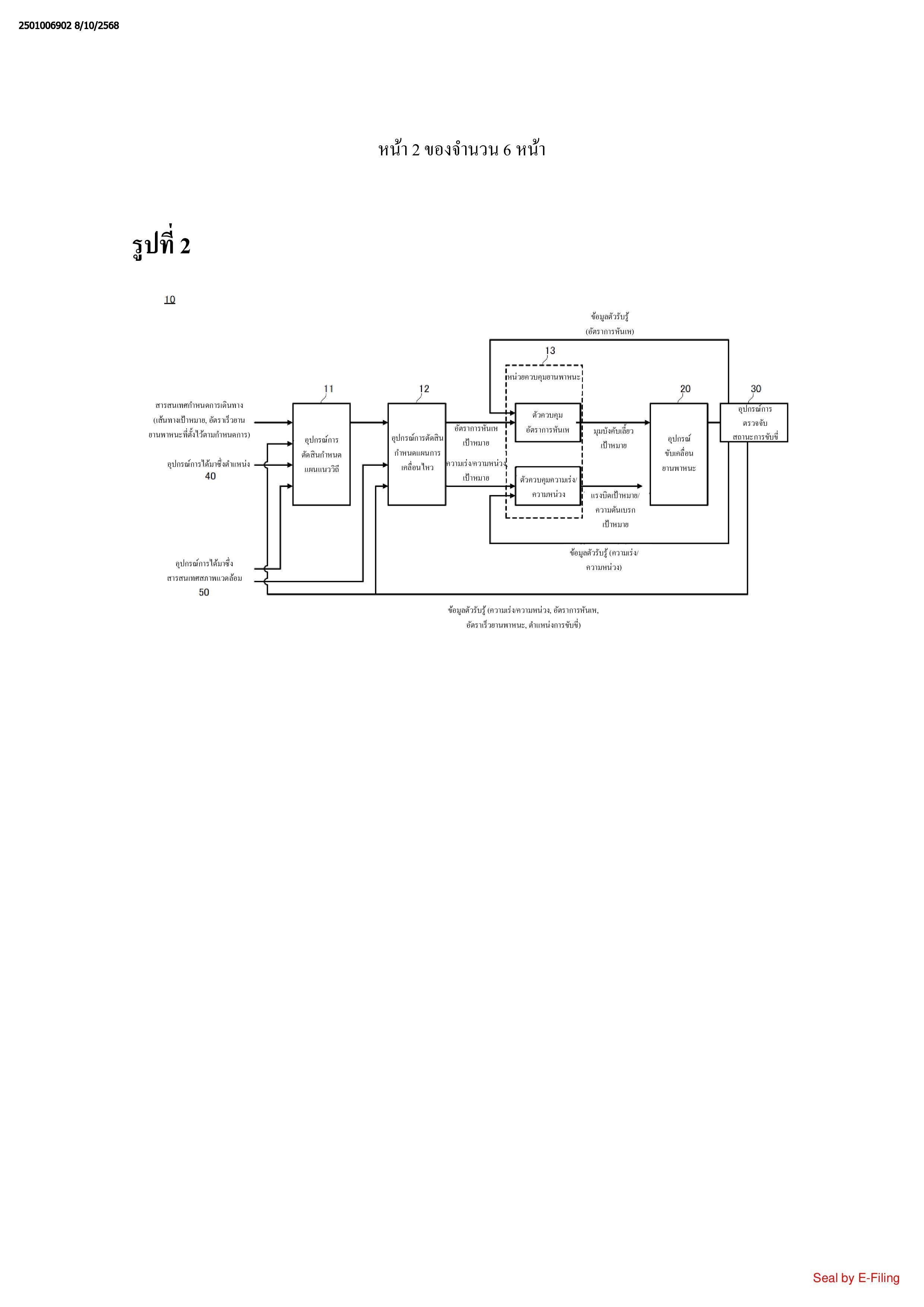
ชุดเครื่องควบคุมของยานพาหนะที่เดินทางอย่างอัตโนมัติไปตามเส้นทางเป้าหมายที่ตัดสิน
กำหนดล่วงหน้า, ชุดเครื่องควบคุมซึ่งประกอบรวมด้วย:
หน่วยการตัดสินกำหนดแผนแนววิถีที่ถูกจัดโครงแบบเพื่อตัดสินกำหนด, โดยอิงตาม
สารสนเทศสภาพแวดล้อมของยานพาหนะ, แผนแนววิถีใดที่จะเลือกใช้เป็นแนววิถีการเดินทาง
อนาคตของยานพาหนะระหว่างแนววิถีการรักษาเส้นทางเป้าหมาย, แนววิถีการหลีกเลี้ยงด้านซ้าย,
และแนววิถีการหลีกเลี่ยงด้านขวา;
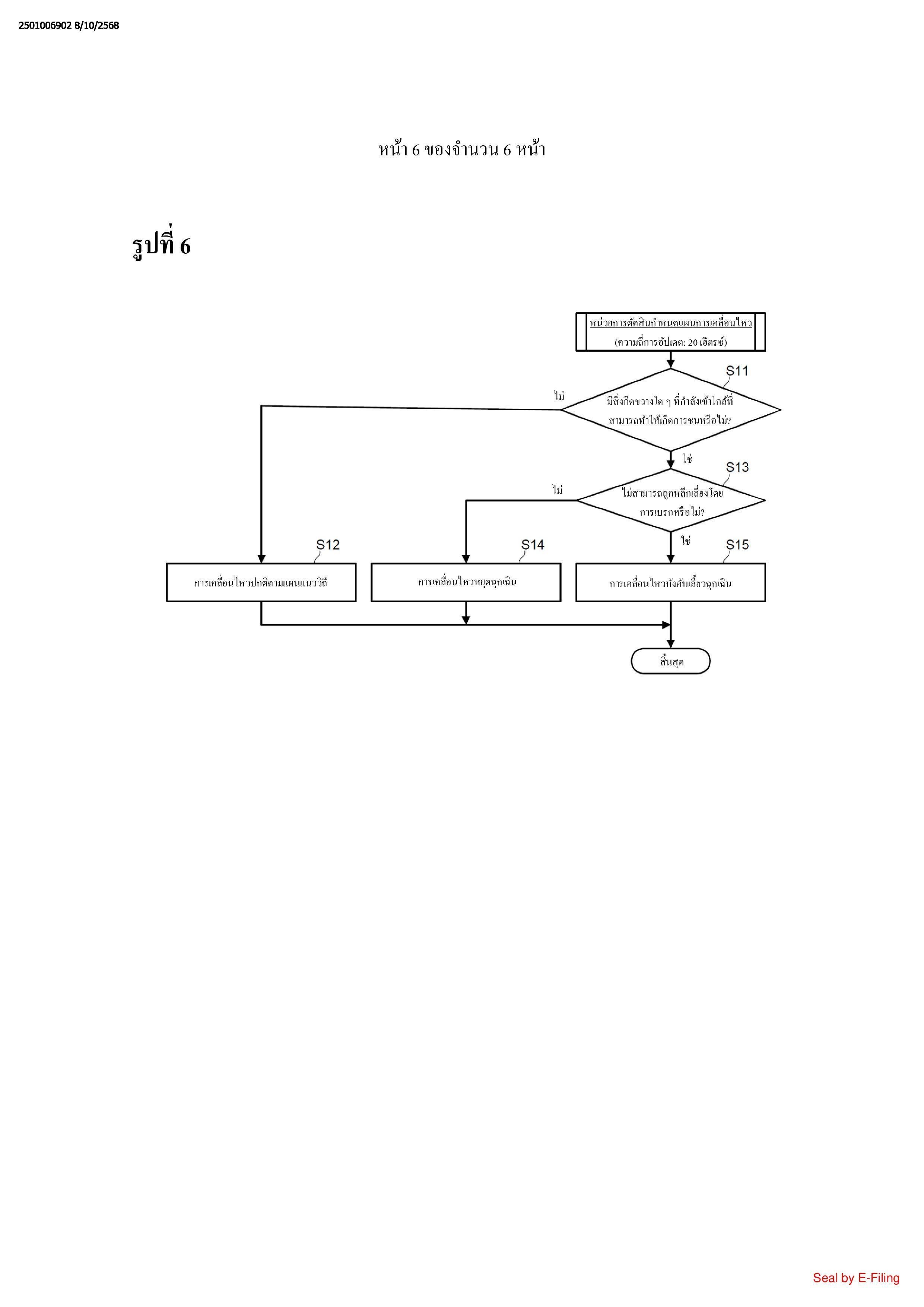
หน่วยการตัดสินกำหนดแผนการเคลื่อนไหวที่ถูกจัดโครงแบบเพื่อตัดสินกำหนด, โดยอิงตาม
สารสนเทศสภาพแวดล้อม, แผนการเลื่อนไหวไหวใดที่จะเลือกใช้เป็นโหมดการเคลื่อนไหวอนาคตของ
ขานพาหนะระหว่างการเคลื่อนไหวปกติตามแผนแนววิถีที่ถูกตัดสินกำหนดหรือการเคลื่อนไหวการ
เคลื่อนย้ายฉุกเฉินที่ปิดการใช้งานชั่วคราวแผนแนววิถีที่ถูกตัดสินกำหนด; และ
หน่วยควบคุมยานพาหนะที่ถูกจัดโครงแบบเพื่อควบคุมยานพาหนะโดยอิงตามแผนการ
เคลื่อนไหวและสารสนเทศสถานะการขับขี่ปัจจุบันของยานพาหนะในลักษณะที่สถานะการขับขี่ของ
ยานพาหนะที่แต่ละจุดเวลาอนาคตเป็นไปตามแผนการเคลื่อนไหวที่ถูกตัดสินกำหนด,
โดยที่หน่วยการตัดสินกำหนดแผนแนววิถีและหน่วยการตัดสินกำหนดแผนการ
เคลื่อนไหวอัปเดตอย่างเป็นลำดับแผนแผแนววิถีและแผนการเคลื่อนไหว, อย่างตามลำดับ. และความถี่
การอัปเดตของหน่วยการตัดสินกำหนดเเผนการเคลื่อนไหวสูงกว่าความถี่การอัปเดตของหน่วยการ
ตัดสินกำหนดแผนแนววิถี
ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่แผนแนววิถีรวมถึงข้อมูลอนุกรมเวลาซึ่งเกี่ยวข้อง
กับตำแหน่งการเดินทางเป้าหมายและอัตราเร็วยานพาหนะเป้าหมายที่แต่ละจุดเวลาอนาดตของ
ธานพาหนะ, และแผนการเคลื่อนไหวรวมถึงข้อมูลอนุกรมเวลาซึ่งเกี่ยวข้องกับความเร่ง/ความหน่วง
เป้าหมายและอัตราการหันเหเป้าหมายที่แต่ละจุดเวลาอนาคตของยานพาหนะ
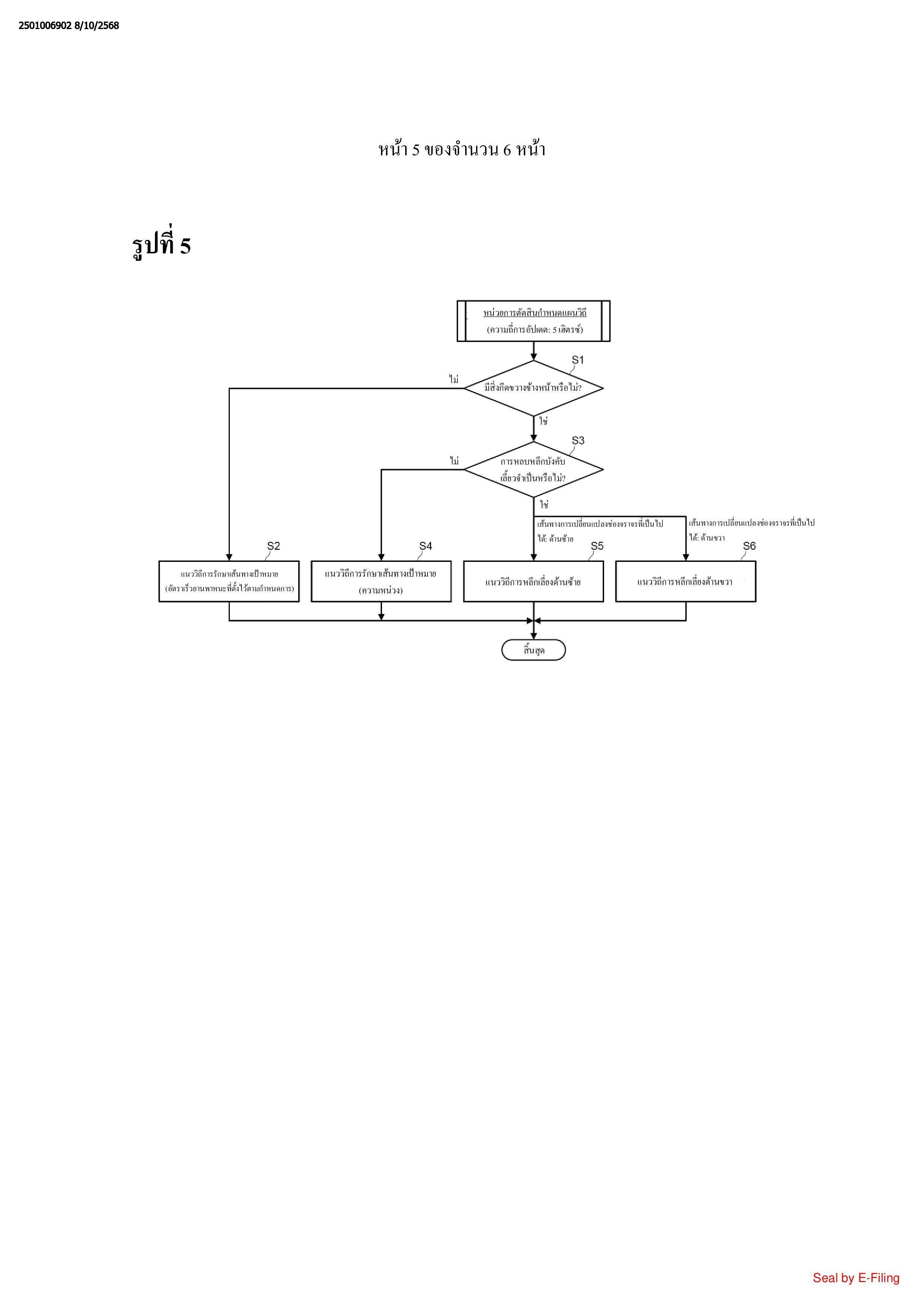
3. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่หน่วยการตัดสินกำหนดแผนแนววิถีที่ถูกจัด โครง
แบบเพื่อรับสิ่งนำเข้าของสารสนเทศสถานะการขับขี่ปัจจุบันของยานพาหนะ, สารสนเทศตำแหน่ง
ปัจจุบันของธานพาหนะ, และสารสนเทศสภาพแวดล้อมของยานพาหนะอย่างเป็นลำดับ, และจำนวณ
โพรไฟล์แนววิถีของแผนแนววิถีที่ถูกตัดสินกำหนดโดยอิงตามชิ้นเหล่านี้ของสารสนเทศ, สารสนเทศ
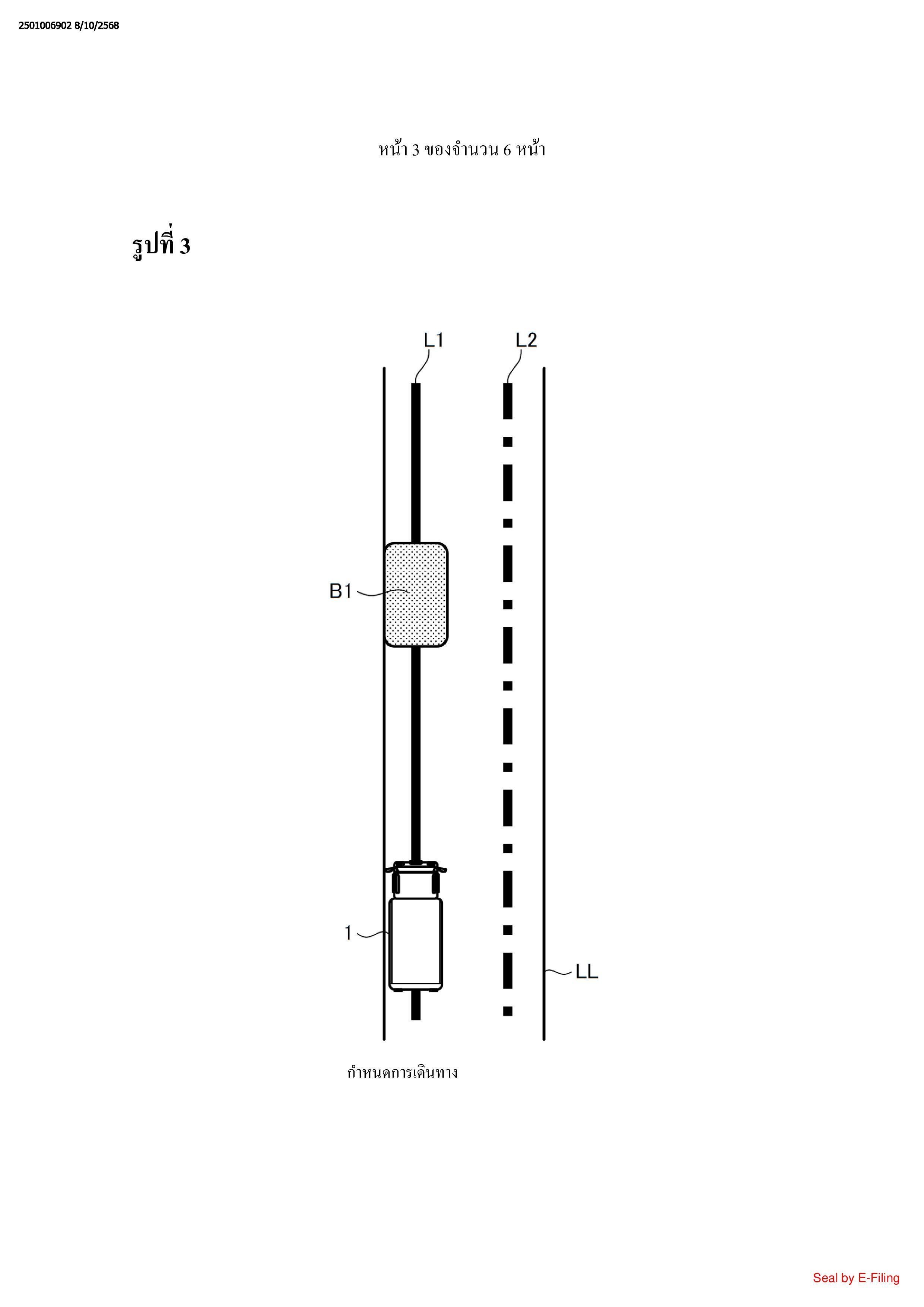
กำหนดการเดินทางซึ่งรวมถึงเส้นทางเป้าหมายและอัตราเร็วยานพาหนะที่ตั้งไว้, สารสนเทศแผนที่,
และแบบจำลองฐานแนววิถีของแผนแนแนววิถีที่สอดคล้อง
4. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 3, โดยที่หน่วยการตัดสินกำหนดแผนแนววิถีที่ถูกจัดโครง
แบบเพื่อเลือกใช้แผนแนววิถีที่เกี่ยวข้องกับแนววิถีรักษาเส้นทางเป้าหมายเมื่อสิ่งกีดขวางไม่ถูก
ตรวจจับเบื้องหน้าของฮานพาหนะในสารสนเทศสภาพแวดล้อม, และเมื่อไม่มีความจำเป็นต้องบังคับ
เลี้ยวหลบสิ่งกีดขวางหรือเมื่อมันเป็นไปไม่ได้ที่จะบังคับเลี้ยวหลบสิ่งกีดขวาง,
และเลือกใช้แผนแนววิถีที่เกี่ยวข้องกับแนววิถีการหลีกเลี่ยงด้านซ้ายหรือแนววิถีการหลีกเลี่ยง
ด้านขวาเมื่อสิ่งกีดขวางถูกตรวจจับเบื้องหน้ายานพาหนะในสารสนเทศสภาพแวดล้อม, และมัน
เป็นไปได้ที่จะบังคับเลี้ยวหลบสิ่งกีดขวางและมันจำเป็นต้องบังคับเลี้ยวหลบสิ่งกีดขวาง
5. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่หน่วยการตัดสินกำหนดแผนการเคลื่อน ไหวที่ถูก
จัดโครงแบบเพื่อรับสิ่งนำเข้าของสารสนเทศสถานะการขับขี่ที่ถูกตรวจจับของยานพาหนะ,
สารสนเทศตำแหน่งปัจจุบันของยานพาหนะ, สารสนเทศสภาพแวดล้อมของยานพาหนะ,และ
สารสนเทศที่เกี่ยวข้องกับแผนแนววิถีที่ถูกตัดสินกำหนดอย่างเป็นลำดับ, และคำนวณโพรไฟล์การ
เคลื่อนไหวของแผนการเคลื่อนไหวที่ถูกตัดสินกำหนดโดขอิงตามชิ้นเหล่านี้ของสารสนเทศและ
แบบจำลองฐานการตลื่อนไหวของแผนการเคลื่อนไหวที่สอดอดดดล้อง
6. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่หน่วยการตัดสินกำหนดแผนการเคลื่อนไหวที่ถูก
จัดโครงแบบเพื่อเลือกใช้แผนการเคลื่อนไหวของการเคลื่อนไหวปกติเมื่อสารสนเทศสภาพแวดล้อม
ไม่ได้ตรวจจับการเข้าใกล้ของสิ่งก็ดขวางที่อาจทำให้เกิดการชนรอบยานพาหนะ. และเลือกใช้
แผนการเคลื่อนไหวของการเคลื่อนไหวการเคลื่อนช้ายถูกเฉินเมื่อสารสนเทศสภาพแวดล้อมตรวจจับ
การเข้าใกล้ของสิ่งกีดขวางที่อาจทำให้เกิดการชนรอบยานพาหนะ
7. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 6, โดยที่การเคลื่อนไหวการเคลื่อนย้ายฉุกเฉินรวมถึงการ
เคลื่อนไหวหยุดฉุกเฉินและการเคลื่อนไหวบังคับเลี้ยวถูกเฉิน, และหน่วยการตัดสินกำหนดแผนการ
เคลื่อนไหวที่ถูกจัดโครงแบบเพื่อเลือกใช้แผนการเคลื่อนไหวของการเคลื่อนไหวหยุดฉุกเฉินเมื่อมัน
เป็นไปได้ที่จะหลืกเลี้ยงการชนระหว่างยานพาหนะและสิ่งกีดขวางโดยการเบรก. และเลือกใช้
แผนการเคลื่อนไหวของการเคลื่อนไหวบังคับเลี้ยวฉุกเฉินเมื่อมันเป็นไปไม่ได้ที่จะหลีกเลี่ยงการชน
ระหว่างยานพาหนะและสิ่งกีดขวางโดยการเบรก
8. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 4, โดยที่, เมื่อเลือกใช้แผนแนววิถีของแนววิถีการหลีกเลี่ยง
ด้านซ้ายหรือแนววิถีการหลีกเลื่องด้านขวา, หน่วยการตัดสินกำหนดแผนแนววิถีที่ถูกจัดโครงแบบเพื่อ
ระบุเส้นทางที่เดินทางได้ที่อยู่ติดกับเส้นทางเป้าหมายโดขอิงตามสารสนเทศภาพแวดล้อมหรือ
สารสนเทศแผนที่, และสร้างสรรค์โพรไฟล์แนววิถีที่สอดคล้องกับเส้นทางที่เดินทางได้
9.ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 5, โดยที่, หากเส้นทางที่เดินทางได้ที่อยู่ติดกับเส้นทาง
เป้าหมายไม่ถูกระบุโดยสารสนเทศสภาพแวดล้อมและสารสนเทศแผนที่, หน่วยการตัดสินกำหนด
แผนแนววิถีวางแผนใหม่เส้นทางเป้าหมายที่แก้ไขแล้วโดยอิงตามตำแหน่งยานพาหนะปัจจุบันและ
ตำแหน่งปลายทางสุดท้ายของเส้นทางเป้าหมายเพื่อสร้างสรรค์โพรไฟล์แนววิถี
10. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่หน่วยการตัดสินกำหนดแผนแนววิถีที่ถูกจัดโครง
แบบเพื่อคำนวณโพรไฟล์แนววิถีของแผนแผแนววิถีโดยอิงตามแบบจำลองจลนศาสตร์ของยานพาหนะ
11. ชุดเครื่องควบคุมตามข้อถือสิทธิที่ 1, โดยที่หน่วยการตัดสินกำหนดแผนการเคลื่อนไหวที่ถูก
จัดโครงแบบเพื่อคำนวณโพรไฟล์การเคลื่อนไหวของแผนการเคลื่อนไหวโดยอิงตามแบบจำลอง
พลวัตของยานพาหนะ