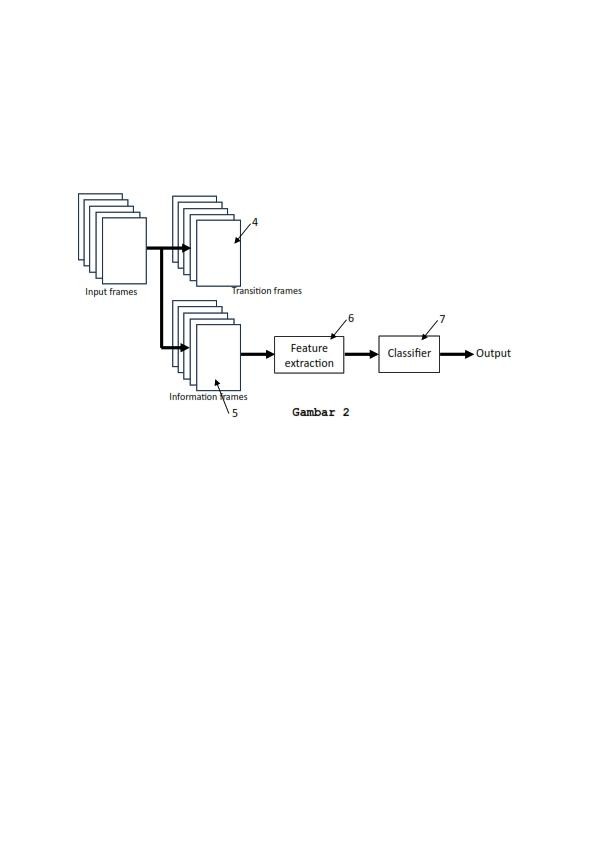
Invensi ini mengungkap suatu metode pengenalan gerakan tangan berbasis kecerdasan buatan yang diterapkan untuk pengendalian peralatan elektronik melalui mekanisme interaksi manusia–mesin. Metode ini berada dalam bidang pengolahan citra digital, visi komputer, kecerdasan buatan, dan pengenalan pola, yang memproses urutan frame video untuk mengidentifikasi frame transisi dan frame informasi secara otomatis. Frame informasi yang terpilih selanjutnya dianalisis menggunakan representasi skeleton tubuh manusia untuk mengekstraksi ciri spasio-geometris berupa jarak dan orientasi antar sendi. Berdasarkan sejumlah frame informasi dalam suatu interval waktu, sistem menghitung parameter statistik berupa nilai rerata dan varians dari ciri tersebut untuk membentuk vektor fitur gerakan tangan. Vektor fitur ini kemudian diklasifikasikan menggunakan algoritma pembelajaran mesin, dalam salah satu implementasinya berupa Support Vector Machine, untuk menentukan kategori gerakan tangan. Hasil klasifikasi selanjutnya diterjemahkan oleh modul pengendali untuk mengaktifkan rangkaian driver elektronik yang terhubung dengan peralatan yang dikendalikan. Dengan mekanisme pemilahan frame transisi dan frame informasi, invensi ini mampu meningkatkan akurasi pengenalan gerakan tangan sekaligus mengurangi beban komputasi dan konsumsi daya sistem, sehingga sesuai untuk implementasi real-time pada perangkat komputasi terbatas.
| Year | Validity Start | Validity End | Payment |
|---|