Application Type
Patents
Application SubType
National Patent
(10) Registration Number and Date
Status
ACTIVE ( Document published)
(180) Expiration Date
(20) Filing Number and Date
TH 2501007739 2025.11.12
(40) Publication Number (Gazette Number) and Date
(10/2569)
2026.03.09
(85) National Entry Date
(30) Priority Details
JP
JP2024-202305
2024.11.20
(51) IPC Classes
(71/73) Applicant
(72) Inventor
(TH) เรียว เซกิกุจิ : ซี/โอ อีซูซุ แอดวานซ์ เอ็นจิเนียริ่ง เซ็นเตอร์, แอลทีดี., 8, สึจิดานะ, ฟูจิซาวะ-ชิ, คานากาว่า 252-0881
(74) Representative
(TH) นาย พัฒน์ เตชะไพฑูรย์ : บริษัท อาดาสตร้า ไอพี (ประเทศไทย) จำกัด เลขที่ 164 ซอยหมู่บ้านปัญญา ตำบลสวนหลวง อำเภอสวนหลวง จังหวัดกรุงเทพมหานคร
(54) Title
(TH)
อุปกรณ์ควบคุมสำหรับยานพาหนะ
(57) Abstract
(TH)
OCR 06WT
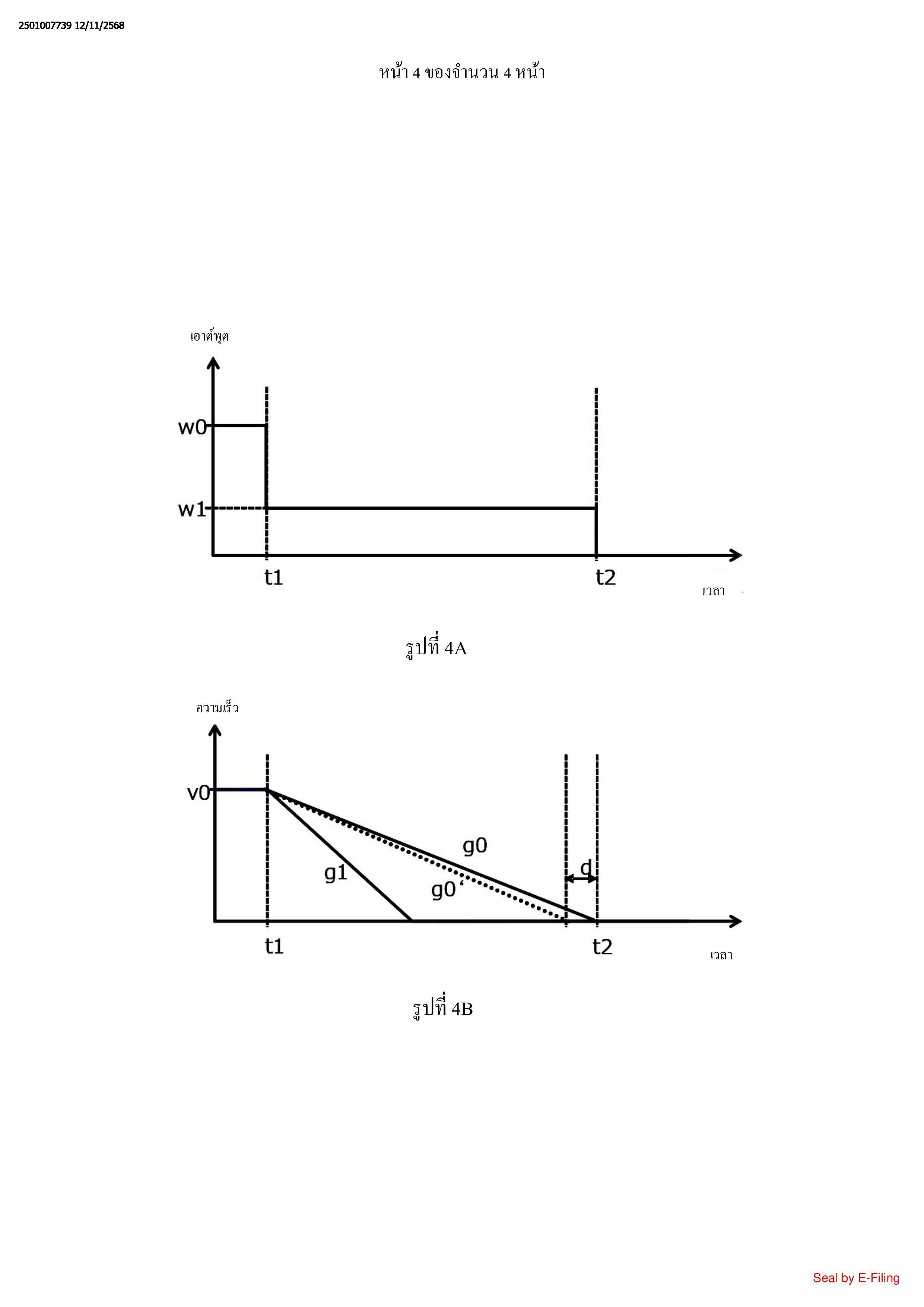
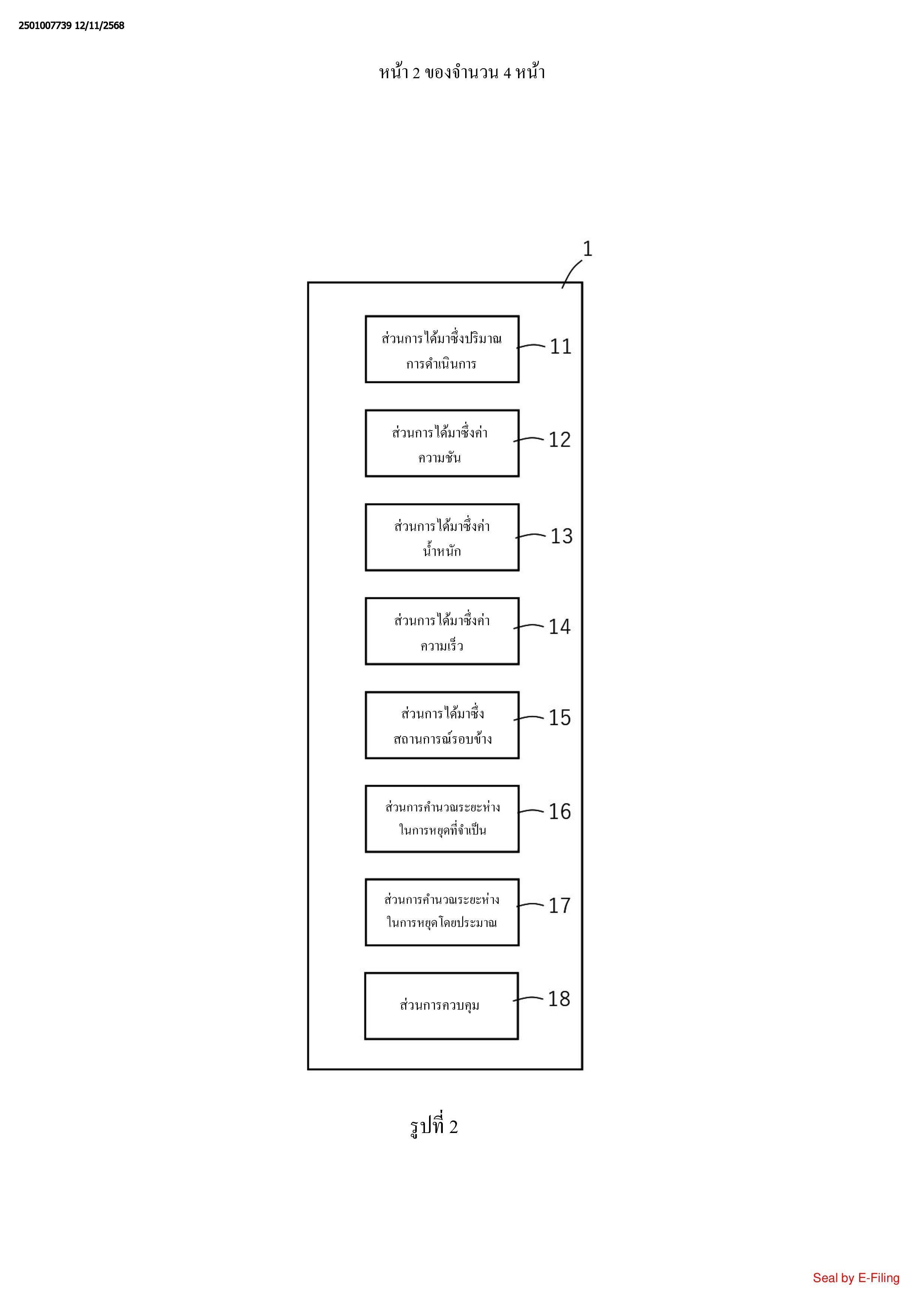
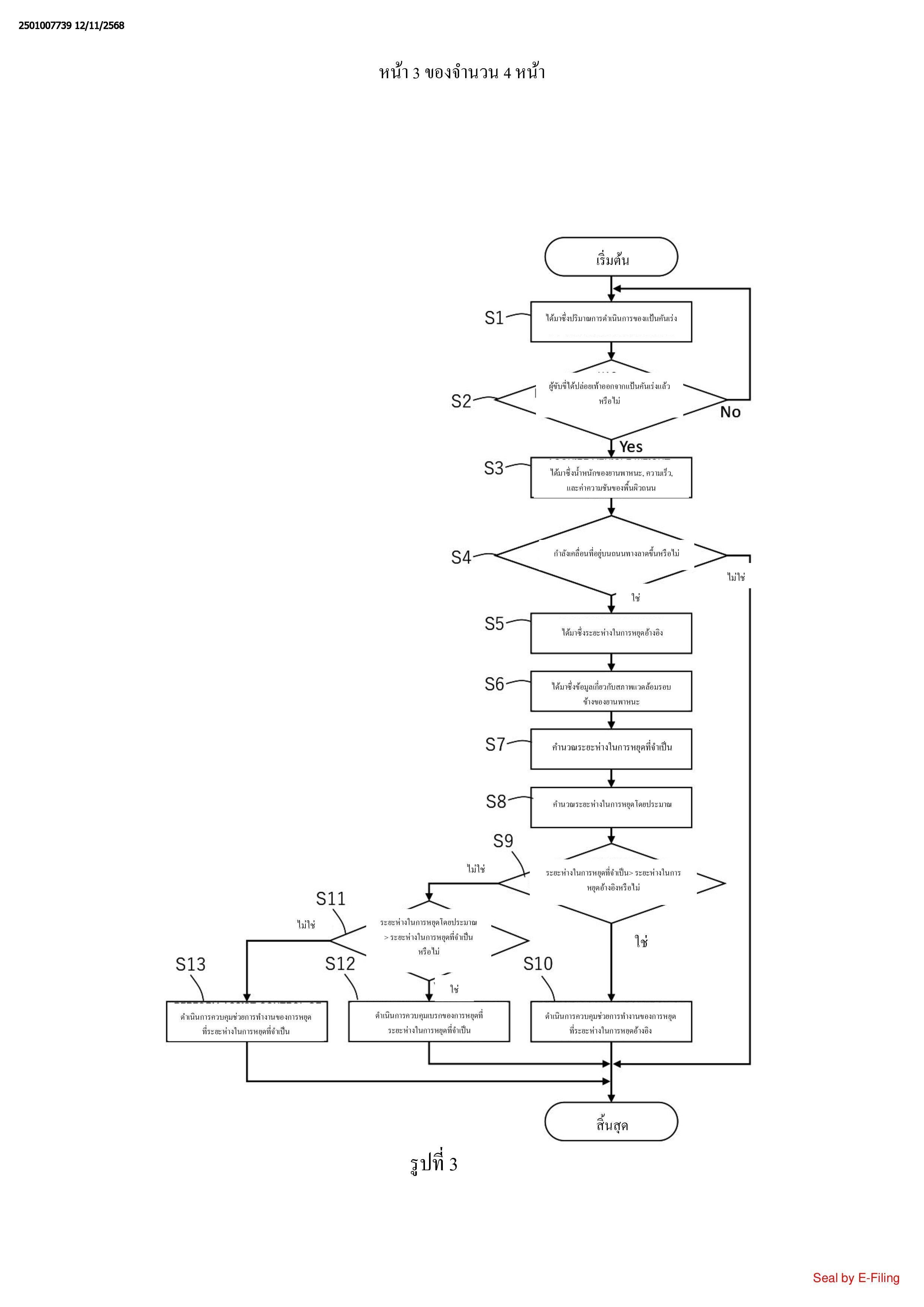
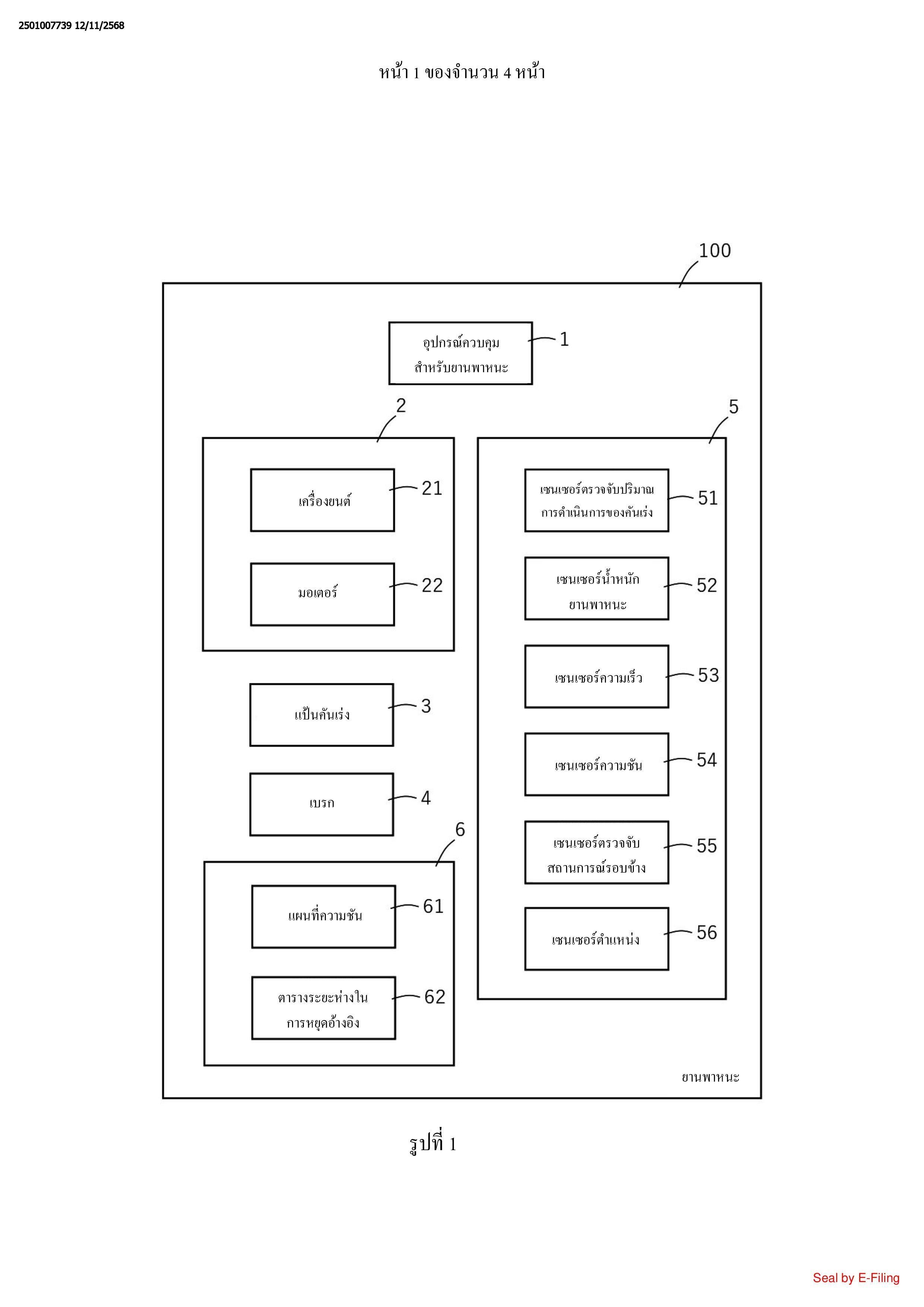
ที่จัดให้มีคืออุปกรณ์ควบคุมสำหรับยานพาหนะซึ่งหยุดยานพาหนะที่ตำแหน่งที่ยานพาหนะ
ต้องหยุด, โดยไม่ต้องดำเนินการแป็นคันเร่งบ่อยครั้งบนถนนทางลาดขึ้น อุปกรณ์ควบคุมสำหรับ
ยานพาหนะจะควบคุมอุปกรณ์ขับเคลื่อนของยานพาหนะโดยอิงจากปริมาณการดำเนินการของพวก
องค์ประกอบการดำเนินการ และรวมถึง: ส่วนการได้มาซึ่งปริมาณการดำเนินการที่ได้มาซึ่งปริมาณ
การดำเนินการ, ส่วนการได้มาซึ่งค่าความชันที่ได้มาซึ่งความชันของพื้นผิวถนนที่ยานพาหนะกำลัง
เคลื่อนที่อยู่, และส่วนการควบคุมที่ควบคุมอุปกรณ์ขับเคลื่อน เพื่อที่ยานพาหนะจะหยุดที่ระยะห่างใน
การหยุดอ้างอิง, ในกรณีที่ความชันเป็นทางลาดขึ้น และปริมาณการดำเนินการกลายเป็นศูนย์ใน
ระหว่างที่เคลื่อนที่โดยอุปกรณ์ขับเคลื่อน
(58) Citations
License Details
(98) Annuity Details
| Year | Validity Start | Validity End | Payment |
|---|